交流发电机电压源是一台发电机,它从不同形式的能量产生电动势。最常见的电压源是交流发电机和电池。交流发电机通过机械旋转转换能量以产生交流信号,由于电...
步进电机运行精度分析及细分电路的合理使用
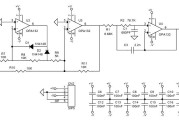
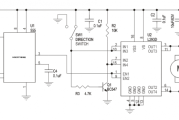
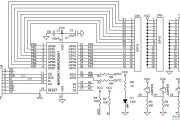
接线图
2023年07月21日 23:10 261
admin
l 引言
步进电机能方便地进行速度与角度控制,使其在现代自动控制方面占有越来越重要的地位。即使在开环状态下,它也能实现较高精度的位置控制。然而,步进电机在使用时,其可控角是以步为单位的,也就是说,角度是跳跃式变化的;而且由于受到加工工艺的影响,一个步长一般在1度左右,每个步长也并非完全相等,因而在精度要求较高的场合,就要求对步进电机转角误差有一定的认识,以及采取相应的提高精度的措施。
2误差的分类
在步进电机的使用中,所产生的转角误差可以分成两大类,一类与步进电机直接有关;而另外一类不仅与步进电机本身有关,还与驱动方式有关。
2.1不积累误差
不积累误差也叫静态步距角误差,指在空载条件下,步进电机的实际运行角度与理论运行角度之间的差别。为了分析方便,在不积累误差中不考虑摩擦力的影响,它与驱动电流也没有任何关系。对于一个质量较高的电机,这个误差一般在57左右。
不同步进电机的不积累误差也是不同的。对于一个特定的电机而言,其不积累误差一般是固定的。原理上可以通过预先测量这些误差,然后通过一定的补偿,以提高精度。但实际上.必须时刻知道步进电机的确切运行位置(也就是运行到哪一步),而要得到这个信息,有两个手段,一是通过其它位置传感器测知这个位置;一是设置一记忆电路,能时刻记住步进电机的位置。然而这样做的结果是增大了电路的复杂性。
由于加工上的原因,步进电机在运行整拍时相互之间的角度间隔误差保持较小的值,因此在要求较高步距精度的时候,可以考虑采用整拍运行方式。
步进电机在整转运行时其不积累误差理论上永远为零,因此在高精度驱动中,可以考虑采用整转运行方案。此时,失调角误差或回滞误差是最大的误差源。
2.2失调角误差
失调角误差也叫负载角误差,指步进电机在驱动负载的条件下,为了产生一定的负载力矩,步进电机需产生一个失调角θ。根据理论计算,对于一个步距角为1.5度的三相步进电机,由于负载力矩丁而引起的角度变化为:

可见,为了得到较高的精度,则必须驱动较低的负载。
2.3回滞误差
如果加在步进电机上的负载力矩改变方向,则所产生的失调角与原来的相反。因此,即使负载保持绝对恒定(包括摩擦力),并假设电机无任何不积累误差,那么由于电机可能的正、反方向运行,也会产生一个相当大的角度误差。
为了消除回滞误差而提高精度,反向驱动时,可多运行一定的步数,然后返回,使负载力矩保持一个方向。
2.4重复误差
在负载绝对恒定的条件下,步进电机朝原来运动方向的反方向运转”步后再前进行步,它的起始位置与终止位置有差别。这个误差的来源比较复杂。_般在几角秒之内,典型值为±0. 0014。。因此,在大多数场合下是可以忽略不计的。
3通电状态对误差的影响
单相通电状态比双相(多相)通电状态的精度要高一些。这主要是由于多相通电时空载步距角将与两相绕组中的电流比有关,改变每一相电流的大小都将影响到步距角精度。在无稳流电路的情况下,这个变化有可能是相当大的。
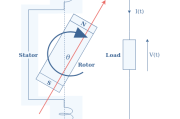
以三相步进电机为例。附图中,设由A,B两相通电所产生的力矩分别为TA、Tu,则有:


然而,对于单相通电,在负载为零的情况下,转子的定位位置与电流的大小无关。

4细分引起的误差
步进电机的步距角一般在1度左右,有时需要比这个值小得多的步距角,可采用细分技术。采用细分技术只能提高步进电机的分辨率,并没有提高其精度。
对于一般的驱动电路,细分后还会带来一些误差。这些误差主要与驱动电源有关。
4.1电压失调误差
对于细分控制的驱动电路,当把一相绕组中的电流关断时,绕组中的电流理论上应为零值。然而,对于具有电流反馈环的驱动电路,由于放大电路的失调,绕组中实际通过的电流波形是有一定区别的。当控制输入为零时,实际输出可能并非为零,在这个电流的作用下,步进电机的转子将会产生一个失调角。达种失调角在用普通驱动电路驱动时也是存在的,只是较小而已。因此,对于精密驱动,应该设置失调电压调整装置,以使失调电流尽可能小。
4.2电流增益误差
在驱动负载时,静态失调角是负载力矩与最大转矩的函数,也就是负载力矩与相电流的函数。因此,当各相电流增益不同时,所产生的静态失调角也将随着角度的变化而变化。因此,保持恒定的电流增益是提高驱动精度的一种手段。值得注意的是,由于电机电枢绕组参数可能相互之间有一定的差别,因此这里所提的增益恒定是一个综合性指标。
电流增益误差对微动步距角误差的影响比较大。小的电流增益误差可以改善微动步距角误差。
失调角误差、电流增益误差等还会对电机的运行特性有一定的影响,带来一定程度的共振。在实际使用时,也可以利用这一性质来调节失调电压及电流。保证电机在整个运行区间都能最平稳的工作,也反映了上述误差已减至最小。
4.3微动角误差
通过细分可以提高步距分辨率。理论上若把一步细分成n等分,则步距角可以减小到原来的以分之一。实际上,根据电机制造工艺、细分电路的不同,实际微步步距并非等分,可能有很大的差别。在具有反馈环的控制系统中,要充分考虑这种不均匀性,以免引起系统的振荡。
细分电路主要用在步进电机的低速运行场合,以提高其运行特性,或者用在具有角度反馈环的闭环控制系统中,以提高精度。采用细分电路后,无疑使步进电机的低速运行特性或在共振颇率附近的运行特性得到提高,而在开环系统中使用这一技术的最大理由就是提高步进电机的稳定性,而并非是为了提高其精度。另外,这种电路也无疑限制了电机的高速运行。
在开环系统中,细分技术并没有提高精度,由于步进电机的整步不积累误差是不变的,因而无论怎样细分,最后的精度是受这个误差限制的。对于一个步距精度为5’的电机,即使采用细分,其定位精度最好时也只能是5。
采用细分后,对两相双极型混合式步进电机,其驱动电流波形为正余弦形;而对于反应式步进电机,理想的驱动电流波形为一谐波较少的阶梯波。合适的细分波形不但可以提高角度分辨率,而且可以提高步进电机的运行特性。
5结语
在现代的一些精密位置控制系统中,步进电机得到了广泛的应用。为了保证整个系统可靠地工作,对步进电机产生的角度误差来源应有一定的认识。单方面追求小的不积累误差并不能从实质上提高系统的精度,只能提高成本,因为通过文中的分析可以看到,可能一个较小的负载力矩就会产生与之相当的角度误差。在一些场合,技巧也是特别重要的。单相通电方式、整步运行方式、整转运行方式等都能在一定程度上改善其精度。
细分能够提供高于步距角大得多的分辨率,然而在开环控制中,很难得到写之相应的精度。这时之所以要使用细分,完全是为了提高其低频运行特性(由于速度上的原因,在高频时很少采用)。为了得到具有分辨率水平的精度,必须采用匹配精度的位置传感器,组成一闭环系统,这无疑增加了电路的复杂性,也降低了可靠性。
相关文章

发表评论