
电容三点式振荡器 电容三点式振荡器是一种电子元件,也叫考毕兹振荡器,是自激振荡器的一种。由串联电容与电感回路及正反馈放大器组成,因振...
交流伺服电动机的结构和接线图解
接线图
2023年07月22日 08:49 458
admin
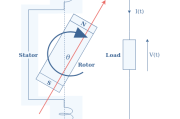
交流伺服电动机的结构与普通的单相异步电动机的结构相似,其定子绕组则与单相电容式异步电动机结构相类似,其上装有两个在空间相隔90o的绕组,一个是励磁绕组WF,另一个是控制绕组WC,这两个绕组通常分别接在两个不同的交流电源(频率相同,相位不同)上,这一点与单相电容式异步电动机不同。其转子一般分为鼠笼转子和杯形转子两种结构型式。鼠笼转子和三相鼠笼式电动机的转子结构相似,杯形转子结构如图所示。杯形转子通常用铝合金或铜合金制成空心薄壁圆筒,为了减小磁阻,在空心杯形转子内放置固定的内定子。不同结构型式的转子都制成具有较小惯量的细长形。目前用得较多的是鼠笼转子。
交流伺服电动机以单相异步电动机原理为基础,励磁绕组WF接到电压为  的交流电网上,控制绕组接到控制电压
的交流电网上,控制绕组接到控制电压  上,当有控制信号输入时,两相绕组便产生旋转磁场。该磁场与转子中的感应电流相互作用产生转矩,使转子跟着旋转磁场以一定的转差率转动起来,其旋转速度 为
上,当有控制信号输入时,两相绕组便产生旋转磁场。该磁场与转子中的感应电流相互作用产生转矩,使转子跟着旋转磁场以一定的转差率转动起来,其旋转速度 为 
式中,f为交流电源频率,Hz;P为磁极对数;  为电动机旋转磁场转速
为电动机旋转磁场转速 ,S 为转差率
,S 为转差率  。把控制电压的相位改变180o,则可改变伺服电动机的旋转方向。
。把控制电压的相位改变180o,则可改变伺服电动机的旋转方向。
根据伺服系统工作性质的要求,控制电压一旦取消,电动机必须立即停止转动。但众所周知,单相异步电动机一旦转动以后,即使取消控制电压,仅靠励磁电压单相供电也会继续转动,即存在“自转”现象,这意味着失去控制作用,是不允许的,因而交流伺服电机必须解决“自转”问题。
从三相异步电动机的特性可知,转子电阻值对电动机的机械特性有较大的影响,如图5-4所示。当转子阻值增大到一定程度,例如图中 时,最大转矩可出现在 =1附近。为此目的,把伺服电动机的转子电阻
时,最大转矩可出现在 =1附近。为此目的,把伺服电动机的转子电阻  设计得很大,使电动机在失去控制信号单相运行时,正转矩或负转矩的最大值均出现在
设计得很大,使电动机在失去控制信号单相运行时,正转矩或负转矩的最大值均出现在 的地方,这样可得出图所示的机械特性曲线。
的地方,这样可得出图所示的机械特性曲线。

图2 不同转子阻值时的机械特性曲线及交流伺服电动机  时的机械特性曲线
时的机械特性曲线
图2中曲线1为有控制电压时伺服电机的机械特性曲线,曲线 为去掉控制电压后,脉动磁场分解为正、反两个旋转磁场对应产生的转矩曲线。曲线 为去掉控制电压后单相供电时的合成转矩曲线。从图中可看出,它与异步电动机的机械特性曲线不同,是在第二和第四象限内。当转速n为正时,电磁转矩T为负,当n为负时,T为正,即去掉控制电压后,单相供电时的电磁转矩的方向总是与转子转向相反,所以,是一个制动转矩。由于制动转矩的存在,可使转子迅速停止转动,从而避免“自转”现象。电机停止转动所需要的时间,比两相电压
为去掉控制电压后,脉动磁场分解为正、反两个旋转磁场对应产生的转矩曲线。曲线 为去掉控制电压后单相供电时的合成转矩曲线。从图中可看出,它与异步电动机的机械特性曲线不同,是在第二和第四象限内。当转速n为正时,电磁转矩T为负,当n为负时,T为正,即去掉控制电压后,单相供电时的电磁转矩的方向总是与转子转向相反,所以,是一个制动转矩。由于制动转矩的存在,可使转子迅速停止转动,从而避免“自转”现象。电机停止转动所需要的时间,比两相电压 同时取消、单靠摩擦等制动方法所需的时间要短得多。这正是两相交流伺服电动机在工作时,励磁绕组始终接在电源上的原因。
同时取消、单靠摩擦等制动方法所需的时间要短得多。这正是两相交流伺服电动机在工作时,励磁绕组始终接在电源上的原因。
增大伺服电机转子阻值 ,既有利于消除“自转”现象,同时还使稳定运行段加宽、启动转矩增大。目前通常采用高电阻材料制成的鼠笼导条,杯形转子的壁很薄,一般只有0.2~0.8mm,因而转子阻值较大,且惯量较小。
,既有利于消除“自转”现象,同时还使稳定运行段加宽、启动转矩增大。目前通常采用高电阻材料制成的鼠笼导条,杯形转子的壁很薄,一般只有0.2~0.8mm,因而转子阻值较大,且惯量较小。

图1 交流伺服电动机接线图 杯形转子伺服电动机结构图
的交流电网上,控制绕组接到控制电压 上,当有控制信号输入时,两相绕组便产生旋转磁场。该磁场与转子中的感应电流相互作用产生转矩,使转子跟着旋转磁场以一定的转差率转动起来,其旋转速度 为为电动机旋转磁场转速,S 为转差率 。把控制电压的相位改变180o,则可改变伺服电动机的旋转方向。根据伺服系统工作性质的要求,控制电压一旦取消,电动机必须立即停止转动。但众所周知,单相异步电动机一旦转动以后,即使取消控制电压,仅靠励磁电压单相供电也会继续转动,即存在“自转”现象,这意味着失去控制作用,是不允许的,因而交流伺服电机必须解决“自转”问题。
从三相异步电动机的特性可知,转子电阻值对电动机的机械特性有较大的影响,如图5-4所示。当转子阻值增大到一定程度,例如图中
时,最大转矩可出现在 =1附近。为此目的,把伺服电动机的转子电阻 设计得很大,使电动机在失去控制信号单相运行时,正转矩或负转矩的最大值均出现在的地方,这样可得出图所示的机械特性曲线。时的机械特性曲线图2中曲线1为有控制电压时伺服电机的机械特性曲线,曲线
为去掉控制电压后,脉动磁场分解为正、反两个旋转磁场对应产生的转矩曲线。曲线 为去掉控制电压后单相供电时的合成转矩曲线。从图中可看出,它与异步电动机的机械特性曲线不同,是在第二和第四象限内。当转速n为正时,电磁转矩T为负,当n为负时,T为正,即去掉控制电压后,单相供电时的电磁转矩的方向总是与转子转向相反,所以,是一个制动转矩。由于制动转矩的存在,可使转子迅速停止转动,从而避免“自转”现象。电机停止转动所需要的时间,比两相电压同时取消、单靠摩擦等制动方法所需的时间要短得多。这正是两相交流伺服电动机在工作时,励磁绕组始终接在电源上的原因。增大伺服电机转子阻值
,既有利于消除“自转”现象,同时还使稳定运行段加宽、启动转矩增大。目前通常采用高电阻材料制成的鼠笼导条,杯形转子的壁很薄,一般只有0.2~0.8mm,因而转子阻值较大,且惯量较小。
相关文章

发表评论