交流发电机电压源是一台发电机,它从不同形式的能量产生电动势。最常见的电压源是交流发电机和电池。交流发电机通过机械旋转转换能量以产生交流信号,由于电...
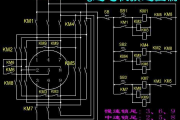
三相异步电动机的制动控制线路
接线图
2023年07月30日 11:39 400
admin
某些生产机械,如车床等要求在工作时频繁的起动与停止;有些工作机械,如起重机的吊勾需要准确定位,这些机械都要求电动机在断电后迅速停转,以提高生产效率和保护安全生产。

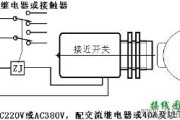
 图中:KM1为电动机正常运行用接触器;KM2为制动用接触器,它需有四个主触头,如果一个接触器的主触头数量不够,可用两个接触器代替;KT为通电延时型时间继电器,用来控制制动时间;T为降压变压器;VC为桥式整流器,由四只二极管组成;RP为滑线式变阻器,用来调整制动电流;FU3为变压器T的短路保护熔断器。(https://www.dgdqw.com版权所有)
图中:KM1为电动机正常运行用接触器;KM2为制动用接触器,它需有四个主触头,如果一个接触器的主触头数量不够,可用两个接触器代替;KT为通电延时型时间继电器,用来控制制动时间;T为降压变压器;VC为桥式整流器,由四只二极管组成;RP为滑线式变阻器,用来调整制动电流;FU3为变压器T的短路保护熔断器。(https://www.dgdqw.com版权所有)
电动机断电后,能使电动机在很短的时间内就停转的方法,称作制动控制。制动控制的方法常用的有二类,即机械制动与电力制动,下面将这两种制动方法介绍如下。
一、机械制动
机械制动是利用机械装置,使电动机迅速停转的方法,经常采用的机械制动设备是电磁抱闸,电闸抱闸的外形结构如图21801所示。

电磁抱闸主要由两部分构成:制动电磁铁和闸瓦制动器。 制动电磁铁由铁芯和线圈组成;线圈有的采用三相电源,有的采用单相电源;闸瓦制动器包括:闸瓦,闸轮,杠杆和弹簧等。闸轮与电动机装在同一根转轴上. 制动强度可通过调整弹簧力来改变。
一)电磁抱闸制动控制线路之一
电磁抱闸制动控制线路之一如图21802所示:

电磁抱闸制动控制线路的工作原理简述如下:
接通电源开关QS后,按起动按钮SB2,接触器KM线圈获电工作并自锁。电磁抱闸YB线圈获电,吸引衔铁(动铁芯),使动、静铁芯吸合,动铁芯克服弹簧拉力,迫使制动杠杆向上移动,从而使制动器的闸瓦与闸轮分开,取消对电动机的制动;与此同时,电动机获电起动至正常运转。当需要停车时,按停止按钮SB1,接触器KM断电释放,电动机的电源被切断的同时,电磁抱闸的线圈也失电, 衔铁被释放,在弹簧拉力的作用下,使闸瓦紧紧抱住闸轮,电动机被制动,迅速停止转动。(https://www.dgdqw.com版权所有)
电磁抱闸制动,在起重机械上被广泛应用。当重物吊到一定高度, 如果线路突然发生故障或停电时,电动机断电,电磁抱闸线圈也断电, 闸瓦立即抱住闸轮使电动机迅速制动停转,从而防止了重物突然落下而发生事故。
二)电磁抱闸制动控制线路之二
采用图21802控制线路,有时会因制动电磁铁的延时释放,造成制动失灵。
造成制动电磁铁延时的主要原因:制动电磁铁线圈并接在电动机引出线上(参见图2-71)。电动机电源切断后,电动机不会立即停止转动,它要因惯性而继续转动。由于转子剩磁的存在,使电动机处于发电运行状态,定子绕组的感应电势加在电磁抱闸YB线圈上。所以当电动机主回路电源被切断后,YB线圈不会立即断电释放,而是在YB线圈的供电电流小到不能使动、静铁芯维持吸合时,才开始释放。
解决上述问题的简单方法是;在线圈YB的供电回路中串入接触器KM的常开触头。如果辅助常开触头容量不够时, 可选用具有五个主触头的接触器。或另外增加一个接触器,将后增加接触器的线圈与原接触器线圈并联。将其主触头串入YB的线圈回路中。这样可使电磁抱闸YB的线圈与电动机主回路同时断电,消除了YB的延时释放。
防止电磁抱闸延时的制动控制线路如图21803所示。

二、电力制动
常用的电力制动有电源反接制动和能耗制动两种。
一)电源反接制动
电源反接制动是依靠改变电动机定子绕组的电源相序,而迫使电动机迅速停转的一种方法。
(一)单向反接制动控制线路
单向运转反接制动控制线路如图21804所示。

起动时,闭合电源开关QS,按起动按钮SB2,接触器KM1获电闭合并自锁,电动机M起动运转。当电动机转速升高到一定值时(如100转/分),速度继电器KS的常开触头闭合,为反接制动作好准备。
停止时,按停止按钮SB1(一定要按到底),按钮SB1常闭触头断开,接触器KM1失电释放,而按钮SB1的常开触头闭合,使接触器KM2获电吸合并自锁,KM2主触头闭合,串入电阻RB进行反接制动,电动机产生一个反向电磁转矩,即制动转矩,迫使电动机转速迅速下降;当电动机转速降至约100转/每分钟以下时,速度继电器KS常开触头断开,接触器KM2线圈断电释放,电动机断电,防止了反向起动。
由于反接制动时,转子与定子旋转磁场的相对速度接近两倍的同步转速,故反接制动时,转子的感应电流很大,定子绕组的电流也随之很大, 相当于全压直接起动时电流的两倍。为此,一般在4.5KW以上的电动机采用反接制动时,应在主电路中串接一定的电阻器,以限制反接制动电流,这个电阻称为反接制动电阻,用RB表示,反接制动电阻器,有三相对称和两相不对称两种联结方法,图21804为对称接法,如某一相不串电阻器,则为二相不对称接法。
串接的制动电阻RRB的阻值可用下式计算
RRB= KUΦ/Ist(Ω)
式中:RRB为反接制动电阻器的阻值,单位为欧姆(Ω);
UΦ为电动机绕组的相电压,单位为 V ;
Ist为电动机全压起动电流,单位为 A ;
K为系数,如果要求反接制动的最大电流等于全压起动电流,K取0.13;如果要求反接制动最大电流为全压起动电流的一半,K取1.5 。
若反接制动时,仅在两相的定子绕组中串接制动电阻,则选用的制动电阻的数值应为上式计算值的1.5倍。
不频繁起动时,反接制电阻的功率为:
PR= 1/4 In 2RRB(In为电动机额定电流,其单位为A)
频繁起动时,反接制动电阻的功率为:
PR=(1/3—1/2)In 2RRB
例如:一台4极鼠笼型电动机,额定功率为20KW,额定电流为38.4A,额定电压为380V,定子绕组为星接,问采用反接制动时,应串联RRB的阻值和功率为多少?
从机电产品样本上查得IST为228A(若无产品样本,则可取 IST=(4—7)In,一般取中间值)。
RRB =1.5×220/228=1.4Ω
PR=1/3 In 2 RRP =1/3×38.42×1.4=164W
图21804控制回路的接线步骤如下:
(1)首先接FU2和FR:由FR常闭接点引出的线为电源1;由另一个FU2引出的线为电源“2”。
(2)将“1”线分别接在KM1、KM两线圈上;将线圈的另一端接至“对方的常闭触头”上;KM1的空常闭接点与速度继电器KS的常开接点相连接,KS的空接点与KM2常开接点连接,并由刚接过线的KM2常开接点引出“KM2的线圈线”接至按钮SB1右侧常开接点上,从KM2的空常开接点引出两根线,一根为“KM2的自锁线”接至按钮SB1的左侧常闭接点上;另一根接至FU2(即电源线“2”)。
(3)从KM2空闲常闭接点引出一长一短两根导线,短线接KM1的常开接点,长线为“KM1线圈线”接至按钮SB2左侧常开接点;从KM1的空常开接点引出“KM1的自锁线”,接按钮SB2右侧常开接点。
(4)按钮开关中:将右侧的SB1常闭接点与SB2常开接点用导线相连;将左侧的SB1常开接点与常闭接点用导线连接。
(5)将主回路及控制回路的所有连接线全部仔细检查一遍,确认无误后,送电试机。
(二)可逆起动反接制动控制线路
1、电动机可逆起动反接制动的控制线路之一
电动机可逆起动反接制动的控制线路之一,如图21805所示。该控制线路由于主回路中没有限流电阻RB,所以只能用于容量较小的电动机。
图中KS—1和KS—2分别为速度继电器正反两个方向的两副常开触头,当按下SB2时,电动机正转,速度继电器的常开触头KS—2闭合,为反接制动作准备,当按下SB3时,电动机反转,速度继电器KS—1闭合,为反接制动作准备。中间继电器KA的作用是:为了防止当操作人员因工作需要而用手转动工件和主轴时,电动机带动速度继电器KS也旋转;当转速达到一定值时,速度继电器的常开触头闭合,电动机获得反向电源而反向冲动,造成工伤事故。
图21805控制线路的工作原理,简述如下:
闭合电源开关QS后按SB2,接触器KM1获电闭合并通过其自锁触头自锁,电动机M正转起动,当电动机转速高于120转/每分钟 时,KS—2闭合,为反接制动作准备。
当需要正转停止时,按SB1,接触器KM1断电释放而中间继电器KA获电吸合并自锁;KA的常开触头断开,切断KM2自锁触头的供电回路,使其不能自锁;KA的常开触头接通KM2的线圈回路,使KM2获电吸合,此时反接制动开始,当电动机的转速降至约100转/每分钟时,速度继电器KS—2断开,使 KM2断电释放,在中间继电器自锁回路中的常开触头KM2断开,使中间继电器KA也失电释放。
反转的起动及反接制动的工作原理与上述相似,不再赘述。
可逆起动反接制动的控制线路之一的参考接线步骤如下:
(1)首先接好电源FU2及热继电器FR常闭触头,引出控制电源“1”与“2”。
(2)将电源“1”接至三个线圈的一端。接触器KM1与KM2的线圈空闲端分别接至对方的常闭触头;从KM1、KM2的两个空常闭触头各引出一长一短两根线,其中两根短线接至对方的常开触头,两根长线为两个接触器各自的线圈线,其中从KM2常闭引出的长线为“KM1的线圈线”,接至SB2左侧常开接点;从KM2常闭引出的长线为“KM2的线圈线”,接至SB3左侧常开接点。
(3) 将KM1、KM2刚接过线的常开触头的空接点,与KA的常闭触头用导线连接,并引出一根长线作为“KM1与KM2的共自锁线”接到SB2(或SB3),右侧常开接点;从KA常闭接点的空闲端点引出一根长线,接至SB1右侧常闭接点;从KA 线圈的空接点引出两短一长共三根线,短线分别接KM1、KM2未接过线的常开接点,长线作为“KA的线圈线”接至SB1左侧常开接点,将刚接过线的KM1、KM2的两个空常开接点与KA 的常开接点连接,将刚接过线的KA常开空触头与另一个KA常开触头连接,并从此点引出一长一短两根导线,其中短线与电源“2”连接,长线作为“电源线”接至SB1右侧常开(或左侧常闭)接点上。
(4)从刚接过线的KA常开空接点引出一根长线接至速度继电器KS 的两个常开触头,将KS-1,KS-2的空接点与KM1、KM2的线圈线连接。此处注意KS-1与KM1线圈线连接,KS-2与KM2线圈线连接。如果KS与按钮开关较近,则将KS 的引出线接至按钮开关SB2、SB3的左侧常开接点;如果KS与接触器KM1、KM2较近,则将KS的引出线接至KM1、KM2的常开自锁触头上(与常闭触头交叉相连的一端)。
(5)将SB1左侧常闭与右侧常开两接点相连接;将SB2与SB3右侧常开的两接点相连接。
(6)检查所有的接线,确认无错漏后,送电试机。
2、可逆起动反接制动控制线路之二
可逆起动反接制动控制线路之二如图21806所示。

图21806的工作原理简述如下:
先合上电源开关QS,按正转按钮SB2,KA1获电吸合并通过KA1-2闭合自锁,KA1-1断开,闭锁了KA2;KA1-4闭合为KM3线圈获电作准备;KA1-3闭合使KM1获电吸合,KM1常闭触头断开,闭锁了KM2;KM1常开触头闭合为KA3获电作准备;KM1主触头闭合,电动机串电阻RB降压起动,当电动机转速上升到使KS-1闭合后,KA3获电吸合,KA3-1闭合为KM2线圈获电作准备;自锁触头KA3-2闭合自锁;KA3-3闭合使KM3获电吸合,KM3主触头闭合短接了电阻RB,电动机获全压正常运转。
需停止时按SB1:KA1失电释放,KA1-1及KA1-2均恢复原始状态;KA1-4断开使KM3断电释放,电阻RB解除短接,串入主回路;KA1-3断开使KM1断电释放,使电动机失电作惯性转动;同时KM1常闭触头恢复闭合,使KM2获电吸合,其主触头闭合,电动机反接制动(串电阻RB), 当电动机转速低到约每分钟100转时,KS-1断开使KA3断电释放,其触头均恢复原始状态,其中KA3—1断开后使KM2断电释放,电动机反接制动过程结束。
相反方向的起动和制动的原理与上述相似,不在贅述。
图21806控制电路中,由于主回路串接了电阻RB,限制了反接制动电流,又能限制起动电流,所以该线路可以用在电动机功率较大的场所。该线路所用电器较多,造价较高,但其运行确实安全可靠,操作也非常方便,电动机在运转时,如需换向运行,只要按动相应的起动按钮,电路便自动完成电动机的断电→串电阻反接制动→电动机转速近于零→串电阻限流换向起动→换向正常运行的全部过程。不必先按停止按钮,这样即简化了操作手续,又提高了电路的反应速度,且制动力很强,所以是一个比较完善的电路。该线路也有一些缺点:如所用电器较多,相应线路较复杂,且造价较高,在制动过程中冲击较大,故此,该线路适用于制动要求迅速,系统惯性较大而且制动不太频繁的场所。
二)能耗制动
三相鼠笼式异电动机的能耗制动,就是把转子储存的机械能转变成电能,又消耗在转子上,使之转化为制动力矩的一种方法。
将正在运转的电动机从电源上切除,向定子绕组通入直流电流,便产生静止的磁场,转子绕组因惯性在静止磁场中旋转,切割磁力线,感应出电动势,产生转子电流,该电流与静止磁场相互作用,产生制动力矩,使电动机转子迅速减速、停转。
这种制动所消耗的能量较小,制动准确率较高,制动转距平滑,但制动力较弱,制动力矩与转速成正比地减小。还需另设直流电源,费用较高。
能耗制动适用于要求制动平稳、停位准确的場所,如铣床;龙门刨床及组合机床的主轴定位等。
(一)无变压器半波整流能耗制动
1、无变压器半波整流能耗制动的自动控制线路之一
无变压器半波整流能耗制动的自动控制线路之一,如图21807所示:

图21807的工作原理如下:
闭合电源开关QS,按起动按钮SB2,接触器KM1线圈获电吸合并自锁,电动机起动运行。
停止时,将停止按钮SB1按到底,使其常开触头可靠闭合,其常闭触头断开,使KM2断电释放,电动机断电作惯性旋转。其常开触头闭合,使时间继电器KT和接触器KM2获电吸合并自锁。电动机进入半波整流能耗制动,待过了预先整定的时间后(此时电动机已停转),KT的延时断开常闭触头断开,切断KM2线圈回路,使KM2断电释放,KM2断电后其常开触头KM2断开,使 KT也失电释放,整个电路恢复至原始状态。
图21807的接线较简单,可直接按接线图接线。
2、无变压器半波整流能耗制动自动控制线路之二
无变压器半波整流能耗制动自动控制线路之二如图21808所示:

图21808电路的主回路与图21807完全相同,如果需要,请参阅图21807。图21808中的KM1是电动机运行用接触器,KM2为电动机制动用接触器,KT为断电延时型时间继电器,用来控制制动时间。
起动时按SB2,KM1与KT同时获电吸合并自锁,KM1获电吸合,使电动机获电运转;KT获电吸合,其常开延时释放触头瞬间闭合,为KM2获电作好准备。
停止时,按SB1,KM1、KT同时断电释放,KM1释放使电动机失电,电动机凭惯性而继续旋转,KT断电使其常开触头KT进入延时释放时刻,待过了预定时间后(此時电动机已停转),KT常开触头断开,切断KM2线圈回路,KM2失电释放,制动过程结束,整个电路恢复至原始状态。
图21808控制线路的接线较简单,可直接按照接线图接线。
3、无变压器半波整流能耗制动手动控制线路
无变压器半波整流能耗制动手动控制线路如图21809所示。

起动时,按起动按钮SB2,KM1获电吸合并自锁,电动机起动运行。需停止时,将停止按钮SB1按到底,且暂不松手,这时KM1断电,而KM2获电,电动机进入制动状态,当电动机停转后,立即松开停止按钮SB1,制动结束。
图21809的接线较简单,可参照其接线图直接进行。
该制动线路简单,所有电器元件少,但其功能较差而且不能准确定位,如果对准确定位要求较严,请采用下面的准确定位控制线路。
4、半波整流能耗制动准确定位控制线路
半波整流能耗制动准确定位控制线路如图21810所示。

图21810的主回路部分可参阅图21807。
图21810中,KM1控制电动机的运行;KM2控制电动机的制动;断电延时型时间继电器KT控制制动时间;SQ为限位开关,控制运动部件的行程。
起动时,按起动按钮SB2,接触器KM1获电吸合后,电动机转动,拖动机床的运动部件(如进刀机构)运动,到达预定位置时,触及限位开关SQ,其常闭触头断开,接触器KM1和时间继电器KT均断电释放,同时限位开关SQ的常开触头闭合(此时KM1的常闭触头已恢复闭合),接通了KM2的线圈回路,使 KM2获电吸合,电动机进行能耗制动。当KT到达预先整定的时间时,其延时常开触头断开,切断KM2的线圈回路,使KM2失电释放,电动机制动结束,整个电路恢复至原始状态。
这种控制线路适用于机床进给机构或其它要求准确定位的场所。
图21810的接线较简单,但是须注意限位开关SQ,如距离按钮开关较近而距离接触器中的电源较远时按接线图中的实线接线,反之则按接线图中的虚线接线,其余接线步骤省略。
(二)、有变压器的全波整流能耗制动控制线路
有变压器的全波整流能耗制动线路如图21811所示。
图中:KM1为电动机正常运行用接触器;KM2为制动用接触器,它需有四个主触头,如果一个接触器的主触头数量不够,可用两个接触器代替;KT为通电延时型时间继电器,用来控制制动时间;T为降压变压器;VC为桥式整流器,由四只二极管组成;RP为滑线式变阻器,用来调整制动电流;FU3为变压器T的短路保护熔断器。(https://www.dgdqw.com版权所有)
图21811中的控制部分原理及接线与图21807相同,请参阅图21807各有关说明。
能耗制动所需要的直流电压Uz和直流电流Iz可分别用下列两个公式计算:
Uz==Iz.R (单位:Uz为V;Iz为A;R为 Ω)
Iz==(3.5—4)I0 或 Iz==1.5In
式中:Uz—-直流电压(V);
Iz——直流电流(A);
R—-直流电压所加定子绕组两端的冷态电阻,即温度为15C0时的电阻(Ω)
I0—电动机空载时的线电流(A);
In—电动机的额定电流。
单向桥式全波整流时,能耗制动所需要的电源变压器二次交流电压Uz和电流Iz为:
U==1.11Uz ; Iz==1.11Iz
变压器所需的容量S(伏安)为:S==Iz×Uz
例如,一台三相鼠笼式异步电动机,额定功率为13千瓦,额定电压为380V,额定电流为25A.空载电流为9.7A,定子绕组为星形,用电桥测得二相定子绕组的电阻为0.64Ω,求这台电动机采用全波整流能耗制动时所需的直流电压、直流电流,变压器的二次电压及容量各为多少?
解:Iz=(3.5—4)I0 取: Iz=4I0=4×9.7=38.8A
Uz=IzR=38.8 × 0.64≈25V
变压器的次级电压为:U2=1.11Uz=1.11×25≈28V
变压器的次级电流为:I2=1.11Iz=1.11×38.8≈43A
变压器的容量为:
S=I2U2=43×28≈1200VA
在设计或选用整流变压器时,可选用在10%处有抽头的变压器,以利调整。
能耗制动较反接制动的优点是制动准确、平稳、能量消耗少;缺点是需附加直流电源装置,制动力较弱,在低速时制动转距小。能耗制动一般用于制动要求平稳、准确的场所,如磨床、龙门刨床等控制线路中。
(三)短接制动控制线路
短接制动是在电动机定子绕组上的供电电源断开的同时,将定子绕组自行短接,这时电动机转子因惯性仍在旋转。由于转子存在剩磁,形成了转子旋转磁场,此磁场切割定子绕组,在定子绕组中产生感应电动势。因定子绕组此时已被KM2(或KM1常闭触头)短接,所以在定子绕组中产生感应电流,该电流与旋转磁场相互作用,产生制动转距,迫使电动机停转。
1、短接制动控制线路之一
短接制动控制线路之一如图21812所示:

在制动过程中,由于定子绕组短接,所以绕组端电压为零。在短接的瞬间产生瞬间短路电流。短路电流的大小取决于剩磁电动势和短路回路的阻抗。虽然瞬间短路电流很大,但电流呈感性,对转子剩磁起去磁作用,使剩磁电势迅速下降,所以短路电流持续时间很短。另外,瞬时短路电流的有功分量很小,故制动作用不太强。所以,这种制动方法只限于小容量的高速异步电动机以及制动要求不高的场所。
当电动机的容量较小时,可采用图中虚线所示电路,即用KM1的常闭辅助触头取代接触器KM2,此时的控制线路改用图20402中的控制线路。
2、短接制动控制线路之二
短接制动控制线路之二如图21813所示:

图21813所示的控制线路适用于正常运行为三角形接法的电动机。在电动机三相定子绕组中每相串接一个整流二极管。电动机正常运行时,接触器KM1、KM2都获电吸合,KM2触头短接二极管。当需要停车时,按停止按钮SB1,KM1和KM2均断电释放,二极管串入绕组工作。电动机转子有剩磁,且在惯性作用下继续旋转,转子剩磁磁场切割定子绕组,产生定向的感应电流。定子感应电流与转子的旋转磁场相互作用,产生制动力矩,迫使电动机停转。
图21812及图21813中,请读者自补接线图。这两个图非常简单,也可以不画接线图,按照原理图直接连接。
短接制动的优点是简单易行,无需特殊的控制设备。制动时,定子的感应电流比电动机空载起动时的电流要小。
短接制动的缺点是:制动作用不强,定位不准确,且仅适用于小容量的高速电动机。
(四)电容制动
电容制动是将工作着的异步电动机在切断电源后,立即在定子绕组的端线上,接入电容器而实现制动的一种方法。
电容制动控制线路如图21814所示:

三组电容器可以接成星形或三角形,与电动机定子出线端形成闭合回路。当运行的电动机断开电源时,转子内的剩磁切割定子绕组产生感应电动势,并向电容充电,其充电电流在定子绕组中形成励磁电流,建立一个磁场,这个磁场与转子剩磁相互作用,产生一个与旋转方向相反的制动力矩,使电动机迅速停转,完成制动。(https://www.dgdqw.com版权所有)
电容制动控制线路的工作原理如下:
起动过程,闭合电源开关QS并按下起动按钮SB2,接触器KM1获电吸合并经KM1-1常开触头自锁,KM1-2常闭触头断开,闭锁了KM2;接触器KM1的主触头闭合,电动机获电运转;KM1-3闭合使时间继电器KT获电吸合,KT的延时断开常开触头瞬间闭合,为KM2获电作准备。需要停车时,按下停止按钮SB1使接触器KM1断电释放,KM1主触头、常开触头KM1-1 KM1-3、常闭触头KM1-2、均恢复至原始状态。其中KM1-2联锁触头恢复闭合时,接触器KM2获电吸合,KM2主触头闭合,将三相制动电容器及电阻R1、R2接入定子绕组,电动机被制动,直至停转;同时,KM1-3的断开使时间继电器KT失电释放,其延时断开常开触头延时至电动机停止后,自动断开,切断接触器KM2线圈回路,使接触器KM2失电释放。至此,全部电器均恢复至原始状态。
控制线路中的电阻R1是调节电阻,用以调节制动力矩的大小,电阻R2为放电电阻。对于380伏、50赫兹的鼠笼式异步电动机,根据经验,每千瓦每相大约需150微法的制动电容,电容的工作电压应不小于电动机的额定电压。
电容制动的方法对高速、低速运转的电动机均能迅速制动,能量损耗小,设备简单,一般用于10千瓦以下的小容量电动机,并且可用于制动较频繁的场所。(https://www.dgdqw.com版权所有)
(五)发电制动
发电制动又称为再生制动或回馈制动。
在电动机工作过程中,由于外力的作用,如起重机在高处下降重物时,可使电动机的旋转速度n2超过定子绕组旋转磁场的同步转速n1。现假定旋转磁场不动,则转子导体将以n2减n1的转速切割磁力线,使电动机转变成发电机运行。将重物的位能转变为电能反馈给电网,所以这种制动方法称为发电制动。
发电制动的经济效益好,可将负载的机械能量变换成电能反送到电网上,发电制动的不足之处是应用范围窄,仅当电动机实际转速大于同步转速时才能实现制动。发电制动常用于起重机械和多速异步电动机。如使电动机转速由二级变为四级时,定子旋转磁场的同步转速由每分钟3000转,变为每分钟1500转,而转子由于惯性,仍以原来的大约每分钟2900转的速度旋转,此时 n 大于 n1 ,电动机产生发电制动作用。
有关电动机的制动,我们已介绍了两大类,十多种控制线路。读者在今后的实际工作中,应根据工作现场的实际情况以及经济条件等因素,灵活地选用这些制动控制线路。
相关文章

发表评论