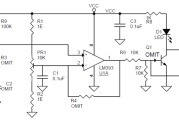
这里介绍的项目是一个模拟电容式接近传感器。该电路来自德州仪器 (TI 应用笔记。大多数传统电容式接近传感器产生“1”或“0”输出,该电路产生直流输出,...
使用传感器正弦 PWM 调制的 BLDC 电机控制
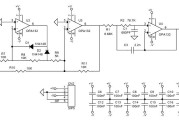
接线图
2023年08月24日 18:23 315
admin
本应用笔记介绍了使用 Z32F128 微控制器进行传感器正弦 PWM 调制的 BLDC 电机控制。它还讨论了如何利用霍尔传感器反馈实现正弦 PWM 调制和相位角同步。
Z32F128 微控制器,Zilog 的 ZNEO32 的成员!MCU 系列专为电机控制应用而设计,该 MultiMotor 系列具有使用 MultiMotor 开发套件的片上集成阵列,包含特定于应用的模拟和数字模块。其结果是快速而精确的故障控制、高系统效率和动态速度/扭矩控制,以及易于定制应用的固件开发。
该 Z32F128 应用代码的节能功能包括:
电机启动平稳,启动电流降低
3 霍尔传感器反馈正弦 PWM 调制
基于微控制器的过流保护
可调速度和电流(频率和正弦幅度)
可选择控制电机方向
用于 PC 控制的 UART 接口
LED 指示电机运行
LED 指示 UART 控制
LED 指示故障情况
非易失性数据记录器功能可记录电机运行状况 使用传感器正弦 PWM 调制的 BLDC 电机控制
讨论
该正弦 PWM 驱动器所基于的 Z32F128 微控制器具有高性能内核;以高达 80 MHz 的内部时钟频率执行指令。
CPU 最多可访问 128 KB 内部闪存(一次 32 位),以提高处理器吞吐量。高达 12 KB 的内部 RAM 可存储数据、变量和堆栈操作。
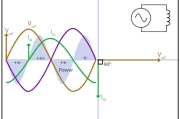
与块换向 PMSM 电机驱动方法相比,PWM 正弦操作具有一定的优势,最显着的是其较低的电气噪声和较低的声学噪声特征。相比之下,块换向方法通过在换向之间打开和关闭电机的相绕组,导致通过 PMSM 电机线圈的剧烈电流转换。PWM 正弦方法不会在电机线圈中产生这些严酷的电流转换,因为电流和相电压本质上是正弦曲线。通过正弦 PWM 控制进行电机运行可以比块换向电机以更高的效率运行电机。
由于 PWM 正弦驱动器方案属性的优点,对于某些关注纹波电容器和滚珠轴承的寿命以及电噪声的应用,PWM 正弦操作可能是更好的选择。
正弦 PWM 驱动方案可用于驱动 PMSM 或 BLDC 型电机,但是,为了利用正弦驱动方案,PMSM 型电机可能会由于其正弦绕线相位而显示出最佳结果,这也会导致电机几乎无齿槽运行,纹波扭矩极小。
在每个 Z32F128 产品中,新颖的器件架构允许实现以下增强的控制功能;本节对每个内容进行了描述。
速度控制时间戳
集成运算放大器
高度可配置的多通道 PWM 定时器,具有周期和占空比中断功能
速度控制时间戳
16 位定时器的捕获功能可用于获取霍尔传感器电气计时周期的时间戳。在预定义的霍尔状态下,读取异步操作定时器的值,并使用 PI 闭环控制将其值与计算出的速度参考值进行比较。
集成运算放大器
家电控制器几乎总是通过使用传感器和无传感器技术与 ADC 结合检测流经电机绕组的电流来监控电机速度。通常,ADC 的采样实例由 MCU 同步。在这个过程中,通常需要使用外部运算放大器将电流信号转换为电压信号;接下来,ADC 对电压信号进行采样,并将结果输出到处理器。然后处理器合成 PWM 输出来控制电机速度。对于 Z32F128 MCU,片上集成运算放大器无需外部组件,从而降低了总体系统成本。
多通道 PWM 定时器
每个 Z32F128 MCU 均具有灵活的 PWM 模块,该模块具有三个互补对(或六个独立的 PWM 输出),支持死区操作和故障保护跳闸输入。这些功能为各种电机类型提供多相控制能力,并通过在故障情况下立即关闭 PWM 引脚来确保电机的安全运行。
Z32F128 微控制器,Zilog 的 ZNEO32 的成员!MCU 系列专为电机控制应用而设计,该 MultiMotor 系列具有使用 MultiMotor 开发套件的片上集成阵列,包含特定于应用的模拟和数字模块。其结果是快速而精确的故障控制、高系统效率和动态速度/扭矩控制,以及易于定制应用的固件开发。
该 Z32F128 应用代码的节能功能包括:
电机启动平稳,启动电流降低
3 霍尔传感器反馈正弦 PWM 调制
基于微控制器的过流保护
可调速度和电流(频率和正弦幅度)
可选择控制电机方向
用于 PC 控制的 UART 接口
LED 指示电机运行
LED 指示 UART 控制
LED 指示故障情况
非易失性数据记录器功能可记录电机运行状况 使用传感器正弦 PWM 调制的 BLDC 电机控制

讨论
该正弦 PWM 驱动器所基于的 Z32F128 微控制器具有高性能内核;以高达 80 MHz 的内部时钟频率执行指令。
CPU 最多可访问 128 KB 内部闪存(一次 32 位),以提高处理器吞吐量。高达 12 KB 的内部 RAM 可存储数据、变量和堆栈操作。
与块换向 PMSM 电机驱动方法相比,PWM 正弦操作具有一定的优势,最显着的是其较低的电气噪声和较低的声学噪声特征。相比之下,块换向方法通过在换向之间打开和关闭电机的相绕组,导致通过 PMSM 电机线圈的剧烈电流转换。PWM 正弦方法不会在电机线圈中产生这些严酷的电流转换,因为电流和相电压本质上是正弦曲线。通过正弦 PWM 控制进行电机运行可以比块换向电机以更高的效率运行电机。
由于 PWM 正弦驱动器方案属性的优点,对于某些关注纹波电容器和滚珠轴承的寿命以及电噪声的应用,PWM 正弦操作可能是更好的选择。
正弦 PWM 驱动方案可用于驱动 PMSM 或 BLDC 型电机,但是,为了利用正弦驱动方案,PMSM 型电机可能会由于其正弦绕线相位而显示出最佳结果,这也会导致电机几乎无齿槽运行,纹波扭矩极小。
在每个 Z32F128 产品中,新颖的器件架构允许实现以下增强的控制功能;本节对每个内容进行了描述。
速度控制时间戳
集成运算放大器
高度可配置的多通道 PWM 定时器,具有周期和占空比中断功能
速度控制时间戳
16 位定时器的捕获功能可用于获取霍尔传感器电气计时周期的时间戳。在预定义的霍尔状态下,读取异步操作定时器的值,并使用 PI 闭环控制将其值与计算出的速度参考值进行比较。
集成运算放大器
家电控制器几乎总是通过使用传感器和无传感器技术与 ADC 结合检测流经电机绕组的电流来监控电机速度。通常,ADC 的采样实例由 MCU 同步。在这个过程中,通常需要使用外部运算放大器将电流信号转换为电压信号;接下来,ADC 对电压信号进行采样,并将结果输出到处理器。然后处理器合成 PWM 输出来控制电机速度。对于 Z32F128 MCU,片上集成运算放大器无需外部组件,从而降低了总体系统成本。
多通道 PWM 定时器
每个 Z32F128 MCU 均具有灵活的 PWM 模块,该模块具有三个互补对(或六个独立的 PWM 输出),支持死区操作和故障保护跳闸输入。这些功能为各种电机类型提供多相控制能力,并通过在故障情况下立即关闭 PWM 引脚来确保电机的安全运行。
相关文章


发表评论