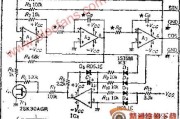
电路的功能用于音响设备的放大器在进行试验时需要低失真率信号源。近来,用于音响电路的低失真率OP放大器的...
模糊控制原理与应用案例
接线图
2023年10月06日 12:43 286
admin
摘要:本文对模糊控制技术的由来与发展,及国内模糊技术控制仪表研发和应用的概况进行了粗略的描述。
模糊计算机技术
1965 年,美国加州大学伯克利分校L .Zadeh 教授发表了著名的论文“Fuzzy Sets”(模糊集),开创了模糊理论。最近十年来,模糊理论又在实际应用中获得重大突破。作为一种高新技术,模糊理论正在讯速发展,预计21 世纪它将成为信息科学中的核心技术之一。
Zadeh 教授当初曾提出过一个著名的不相容原理:“随着系统复杂性增加,人们对系统进行精确而有效地描述的能力降低,直至一个阈值,精确和有效成为互斥。”其实质在于:真实世界中的问题,其概念往往没有明确的界限,而传统数学的分类总试图定义清晰的界限,这是一种矛盾,一定条件下会变成对立的东西。从而引出一个极其简单而又重要的思想:任何事情都离不开隶属程度的概念。这就是模糊理论的基本出发点。
模糊技术发展过程中有一些重要的里程碑,现仅列出其中若干项如下:
1965 年,模糊集(美国Zadeh);
1973 年,语言方法(模糊逻辑)(美国Zadeh);
1974 年,蒸汽涡轮机控制实验(英国Mamdani);
1985 年,第一个模糊推理芯片问世(美国Togai);
1987 年,仙台地铁机车全自动驾驶(日本日立公司);
1990 年起,家用电器“模糊热”例如:电饭煲‐日本岩上笃行1992 年;洗衣机‐ASW‐60V;
空调‐模糊技术控制1991 年;吸尘器‐石井吉太郎1991 年;模糊控制缝纫机‐1991 年;模糊复印机‐SFT‐Z125;日本三洋模糊控制8mm 摄录像机;5 门模糊控制电冰箱‐MR‐B46K;模糊控制和神经网络煤油取暖器;模糊控制燃气热水器;模糊控制微波炉等等。
什么是模糊逻辑
Zadeh 教授把普通的集合推广到模糊集合论是基于真实世界中的概念往往是没有清晰界限这一事实的。
1) 普通的集合 集合中的成员是具有精确特性的对象。例如“8 到12 的实数集合”是一个清晰的集合C,C={实数r|8≤r≤12}。用特征函数M(r)表示成员r 隶属于集合C 的程度,
即{M=1 (8≤r≤12)
M=0 (其它情况)
这个特征函数是唯一的,且只有两个答案,即“是”和“否”,对应于传统的二值逻辑。
2) 模糊集合 集合中成员的特性是模糊的。例如“接近于10 的实数集合”是一个模糊集
合F: F={ 接近于10 的实数r}
这时,特征函数M(r)不是唯一的。
模糊逻辑具有两种属性。
① 概率性:事件本身是清晰的,只是事件出现频数具有一确定性。例如,在一个群体中“老年人得心脏病”的机会一般可能统计方法得到。
② 模糊性:事件本身含糊不清的,而事件出现是确定的(当然也可以是不确定的)。
例:
如年龄分组,“青年”、“老年”等,是一些模糊的概念,且是确实存在的,它们不一定通过统计来规定。在一定的社会背影下,完全可以人为确定其年龄段来定义“青年”、“老年”等概念。
国外模糊控制枝术的发展
模糊理论源于美国,但长期以来受学派之争的束缚,实际应用进展缓慢。到20 世纪80年代后期,在日本以家用电器广泛使用模糊控制为突破口,使模糊逻辑的实际应用获得迅速发展。20 世纪90 年代初,美国已感受到“美国人的理论却让日本人赚钱”的教训,工业界也行动起来。美国IEEE 自1992 年开始,专门针对“模糊系统”主题定期举行国际会议和出版学术期刊。中国从事模糊数学的研究比较早,但实际应用仍有一定差距。
在工业生产的实际过程中,有一些用传统方法难以实现较好控制的生产过程。其困难来自于那些时变的,非线性的复杂控制,这些生产过程无法获得精确的数学模型,或虽然能获得数学模型而过于复杂。例如微分方程的阶次过高,然而这类难以用常规方法实现的控制过程,由操作人员凭借其丰富的实践经验,采取合适的对策,往往能出色的控制好生产过程,而模糊控制方法,就是模拟人的思维,将其运用到生产过程控制中并取得成功的方法之一。
随着大规模集成电路的发展和模糊电子技术的开发应用,美国、日本等国家已推出多种带模糊逻辑处理功能的典型的微计算机芯片,如NLX230 单片模糊微计算机芯片。NLX230 单片模糊微计算机芯片简称单片模糊芯片,是Neuralogix 公司生产的通用单片微计算机芯片的一种,他可用来增强或取代那些有高性能、低成本要求的系统中的常规微计算机芯片。单片模糊芯片采用模糊逻辑原理进行工作。他根据输入条件算出一个最佳的输出动作,来实行有效的控制。NLX230 在低成本下运算速度可达3000 万条规则/秒。模糊芯片主要运用于下列方面:(1)替代传统的PID 控制;(2)新型仪器;(3)模式匹配(图形匹配);(4)汽车应用系统(5)程序裝置、控制设备和定时器;(6)机器设备(7)近似推理(8)专家系统。NLX230 模糊芯片的主要性能特点为:(1)强有力的模糊逻辑处理能力;(2)可用简单的、低成本的PC 机为基础进行开发;(3)可串联使用;(4)外围电路简单,使用方便;(5)采用CMOS 技术,功耗低;(6)有8 路输入和输出;(7)每路输入均16 个输入模糊器;(8)总共有64 条规则可使用;(9)可与微机芯片直接接口;(10)振蕩电路可用石英或RC 网络。使用说明:NLX230 是一种可组合的大规模集成电路模糊芯片。用並行方式提供输入向量的规则集合,这些规则决定根据当前的输入情况该怎样进行控制。为了方便地进行计算,采用了一种直线型对称的隶属函数和最简单的最大最小模糊推理方法。输出控制值由使用者来定义,以后在控制中根据输入情况进行模糊集合运算,求出控制值的修正量,对对象进行控制。对于全部的输入输出都用並行处理完成。所有64 条规则能被存储在芯片上24 位宽度的规则寄存器中,这些规则能被所有的输出分享。
1、模糊控制算法原理
典型的模糊控制系统如图

图中:e(n):实际偏差;K1:偏差比例因子;ec(n):偏差变化率;K2:偏差变化比例因子
C(n):经过模糊关系矩阵运算,模糊判决所得出的输出增量决策值;U(N):实际输出量;
Q:量化过程 K3:输出增量决策值比例因子
确定模糊控制算法,即求取模糊控制规则,是设计模糊控制器的关键,主要分以下四步:
(1)定义描述输入,输出的语言变量(模糊状态)及其论域。
设系统的观察量为一维:偏差E 和偏差变化EC 输出量为一维C,并分别定义在各自
的论域上。
E=|EC| , EC=|EC| , C=|C|
如:偏差E 用“NB(负大)”,“NM 负中”,“NS 负小”,“Nz(负零)”,“PZ(正零)”,
“PS(正小)”,“PM(正中)”,“PB(正大)”
八个模糊状态来描述,其相应论域为:E={‐6,‐5~~~~~~,‐0,0,1,~~~~~~6}
偏差变化用NB,NM,NS,NZ,PZ,PS,PM 和PB
八个模糊状态来描述,其相应论域为:
EC={‐6,‐5~~~~~~‐1,‐0,0,1,~~~~~6} 输出增量决策值用:NB,NM,NS,ZE,
PZ,PS,PM 和PB,八个模糊状态来描述,其相应论域为:c={‐7,‐6,‐5~~~~‐0,0,1,~~~~~7}
(2)定义各模糊状态的隶属函数
在经典集中论中,一个状态X 与一个集合Y 的关系,可用简单的二值逻辑(0,1)
来描述,即XEY,记作HY(X)=1 或X 为Y,记作HY(X)=0。但事实上,当我们讨
论一个状态X 与一个集合Y 的符合程度时,往往不能作绝对的肯定或否定,而只能
判断X 与Y 的大致符合程度,这一符合程度用[0,1]闭区间上的一个实数来度量,
记作HY(X)表示X 对Y 的隶属度。这种没有明确外延的概念,称为模糊概念,当
HY(X)随X 变化而变化时,HY(X)即为隶属函数。
例如:描述偏差E 的八个模糊状态与相应论域间的符合程度可用下列八个隶属函数
来描述:

同样可以用隶属函数来描述偏差变化EC 和输出增量决策值C 的模糊状态。
(3)探索控制策略
经过探索将有经验的操作人员的控制策略分析归纳后,用(1)中所定义的模糊状态
进行描述,例如:若NB 为NB 且Ec=NB 则NC 为PB
相关文章
发表评论