DRV2605($1.8000 器件设计用于通过共享的I2C 兼容总线提供极为灵活的ERM 和LRA 传动器触控。该控制使得主机处理器不用再生成脉宽调...
放音与电源模块设计 - 语音识别机器人系统电路设计
接线图
2023年09月27日 21:05 354
admin
电源模块
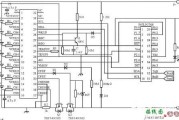
电源输入端口是61板的能源供应中心,整块板子的电源都是由此提供进去,可采用电池或稳压电源提供5V输入,并且必须至少保证电流在50mA以上,否则会造成系统无法倍频和下载出错。SPCE061A的内核供电为3.3V,由于I/O端口可接3.3V也可以接5V,所以在电源模块中有一个端口电平选择跳线J5用于选择端口电压,电源模块参看图,如下:

由于此系统需要的端口高电平为5V,所以图当中的J5跳线需要跳到1和2上。
放音电路设计

将HM628128A中存储的语音数据顺序取出,解码后,以8kHz的速率进行D/A转换输出,语音数据经电容滤波恢复成原始语音波形,最后用三极管驱动扬声器放音。SPCE061A音频输出共有两个DAC通道,DAC1和DAC2输出的模拟电信号通过DAC1和DAC2引脚输出。DAC的输出范围是0x0000~0xFFFF。DAC1和DAC2的输出数据应写入P_DAC1和P_DAC2单元。上电复位以后,两个DAC均被自动打开,此时会消耗少量的电流(几个毫安)。如若不需要,尽量关闭DAC输出(将P_DAC_Ctrl单元的第一位置为1)。而且DAC的直流电压必须保持平稳地变化,否则可能由于电压的突变引起扬声器产生杂音。为减缓电压的变化幅度,从而输出高质量的音频数据可以采用ramp up/down技术。其应用条件是:被唤醒/上电复位后首次使用DAC时,上电复位功能应在被关闭/进入睡眠状态之前。 放音利用的是SPCE061A内部的DAC,电路参看图 4-8。图中的SPY0030是凌阳公司的产品。和LM386相比,在工作电压上,LM386需在4V以上,而SPY0030仅需2.4V(两节电池)即可工作;在输出功率上,LM386仅在100mW以上,而SPY0030可达700mW。
机器人硬件驱动电路

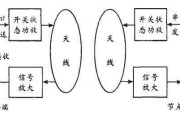
机器人驱动电路采用功率较大的三极管搭成H桥来驱动电机从而实现电机的正向旋转与电机的反向旋转,本系统中使用H桥驱动的电机包括两个用于走路的电机与一个头部转向的电机。同时用了一个三极管驱动单向旋转的电机,如加速电机与发射电机。
语音处理技术本身就是一门理论性强、实用面广而且难度较大的综合学科。而开发出具有语音功能的单片机也是相当困难的。凌阳unsp系列16位单片机,就是适应这种需求而设计的。凌阳SPCE061A实现语音识别其独特之处在于:硬件电路简单,因为SPCE061A是一款专门为语音信号处理设计的单片机,麦克风和喇叭可以直接接入,接放大电路可不用外接。具有一套高效的指令系统,软件编程容易,有相应的API函数,可直接调用。
相关文章


发表评论