
双联开关接线图双联开关接线图双联开关接线图【实战问题】 家用卫生间有个开关,是2个按纽的,一个控制镜前灯,另一个控制吸顶灯,开关呢,是松日的,有 6个...
位置、运动和接近传感技术
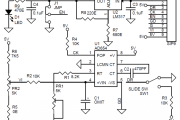
接线图
2023年09月27日 22:09 247
admin
当系统交叉频率远离功率级交叉频率时,会产生具有更好增益和相位裕度的稳定输出。尽管瞬态响应较慢,但所选系统越远越好。
当系统交叉频率远离功率级交叉频率时,会产生具有更好增益和相位裕度的稳定输出。尽管瞬态响应较慢,但所选系统越远越好。在本文中,我们将尝试讨论反馈环路和斜率补偿。本文还将描述二极管电流必须首先减小才能增加的现象,通常称为右半平面 (RHP) 不稳定性。
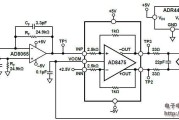
所选系统交叉频率与功率级交叉频率越远,输出越稳定(具有更好的增益和相位裕度),但瞬态响应越慢。大约 45° 的相位裕度提供了良好的响应,有一点过冲,但没有振铃。 除了简单地增加所有工作频率下的误差放大器增益以将系统转折频率移至安全区域外,还可以通过向运算放大器反馈添加补偿来使误差放大器相移与频率相关:
当系统交叉频率远离功率级交叉频率时,会产生具有更好增益和相位裕度的稳定输出。尽管瞬态响应较慢,但所选系统越远越好。在本文中,我们将尝试讨论反馈环路和斜率补偿。本文还将描述二极管电流必须首先减小才能增加的现象,通常称为右半平面 (RHP) 不稳定性。
所选系统交叉频率与功率级交叉频率越远,输出越稳定(具有更好的增益和相位裕度),但瞬态响应越慢。大约 45° 的相位裕度提供了良好的响应,有一点过冲,但没有振铃。 除了简单地增加所有工作频率下的误差放大器增益以将系统转折频率移至安全区域外,还可以通过向运算放大器反馈添加补偿来使误差放大器相移与频率相关:
可以选择补偿元件值,以便在临界交叉频率处相位反转并增加相位裕度,从而提高稳定性。这使得输出滤波器的阻尼较小,从而加速 DC/DC 转换
 反馈环路补偿_2.png
反馈环路补偿_2.png
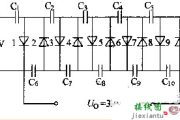
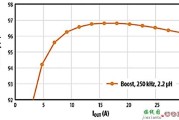
这种现象(二极管电流必须先减小然后才能增大)称为右半平面 (RHP) 不稳定性,因为输出电流暂时与占空比异相 180。例如,在简单的升压转换器中,根据以下公式出现临时附加零:
右半平面零位计算
RHP 不稳定性几乎无法补偿,特别是当零随负载电流变化时。解决方案是设计反馈环路,其交叉频率远低于 RHP 零点出现的最低频率(这具有缩短 DC/DC 转换器对阶跃负载变化的反应时间的缺点),以便在不连续模式 (DCM) 可完全消除该问题。
斜率补偿 反馈环路不稳定的另一潜在原因是次谐波或分叉不稳定。根本原因是 PWM 比较器将反馈电压电平与定时锯齿形电压斜坡进行比较。之所以会出现这个问题,是因为电感器中的能量在每个开关周期中都没有完全释放,导致电流在错误的时间流回反馈电路,或者仅仅是由于比较器输入上的开关噪声。效果是相同的:PWM 调制器产生分叉或双拍。
次谐波不稳定问题的解决方案称为斜率补偿。将人工斜坡波形(通常源自电感器电流的斜率或有时直接源自定时电容器电压)添加到反馈电压,以避免 PWM 比较器的错误触发或重新触发。
相关文章
发表评论