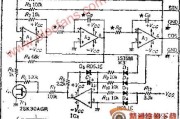
电路的功能用于音响设备的放大器在进行试验时需要低失真率信号源。近来,用于音响电路的低失真率OP放大器的...
变频器PID功能怎么用?变频器的PID控制设置方法图解
接线图
2023年10月06日 12:37 1.0K+
admin
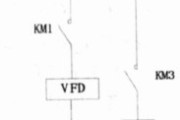
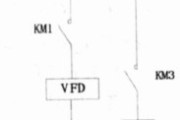
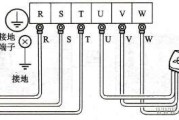
在闭环自动控制系统中,我们总是希望控制目标尽可能地接近理想值。实现这一目标的方法就是对控制后的物理量进行取样,并将取样值与控制目标值进行比较,然后根据比较的结果再次对被控物理量进行调整。既然希望被控物理量的实际值与控制目标无限接近,那么我们取样得到的误差值就必然很小。这与期望的较高控制灵敏度要求相悖。为了提高控制与调节的灵敏度,PID控制技术将较小的误差信号按照一定的比例进行放大,从而实现提高控制与调节的灵敏度的目的。这就是PID控制功能中的比例控制功能P。 误差信号被放大后,变频器的输出频率能够快速得到调整,但由于传动系统和控制电路都有惯性,当系统调整后的实际值已经与目标值极其接近甚至相等时,上述调整不能立即停止,形成过调整,即调过了头,于是又反过来调整,再次在反方向上超调,形成振荡,当然这也不是我们所期望的。 PID系统中的积分控制功能I就是为了消除系统振荡而设置的。而微分控制D是根据偏差的变化率大小,提前给出一个相应的调节动作,从而缩短调节时间。 PID调节属于闭环控制,是过程控制中应用得相当普遍的一种控制方式。PID控制是使控制系统的被控物理量能够迅速而准确地尽可能接近控制目标的一种手段。 一、如何使PID控制功能有效 要实现闭环的PID控制功能,首先应将PID功能预置为有效。具体方法有如下两种:一是通过变频器的功能参数码预置,例如艾默生TD3000变频器,其功能参数F7.00是“闭环控制功能选择”,将F7.00参数设为0时,则不选择PID闭环控制功能;设为1时为选择模拟闭环控制功能。二是由变频器的外接多功能端子的状态决定,例如富士G11S系列变频器,如图1所示,在多功能输入端子X1~X9中任选一个,将功能码E01~E09(与端子X1~X9相对应)预置为20,则该端子即具有决定PID控制是否有效的功能(功能码E01~E09可设置0~35共36种不同的功能,如果将端子X1经E01设置为20,则端子X1与公共端子CM“ON”时无效,“OFF”时有效)。应注意的是,大部分变频器兼有上述两种预置方式,但有少数品牌的变频器只有其中的一种方式。




相关文章

发表评论