
双联开关接线图双联开关接线图双联开关接线图【实战问题】 家用卫生间有个开关,是2个按纽的,一个控制镜前灯,另一个控制吸顶灯,开关呢,是松日的,有 6个...
西门子PLC集成脉冲输出通过步进电机进行定位控制
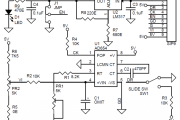
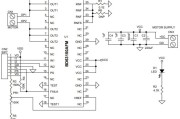
接线图
2023年10月06日 12:39 203
admin
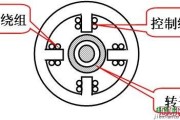
关于定位控制(Positioning,调节(Regulated)和控制(Controlled)操作之间存在一些区别。步进电机小需要连续的位置控制,而在控制操作中得到应用。在以下的程序例子中,借助于CPU214所产生的集成脉冲输出,通过步进电机来实现相对的位置控制。虽然这种类型的定位控制小需要参考点,本例还是初略地描述了确定参考点的简单步骤。因为实际上它总是相对一根轴确定一个固定的参考点,因此,用户借助于一个输入字节的对偶码(Duul coding)给CPU指定定位角度。用户程序根据该码计算出所需的定位步数,再由CPU输出相关个数的控制脉冲。
例图

硬件要求

程序框图

程序和注释
一、初始化
在程序的第一个扫描周期(SM0.1=1),初始化重要参数。
二、设置和取消参考点
如果还没有确定参考点,那么参考点曲线(Reference Point Curve)应从按“START"(起动)按钮(I1 .0开始。CPU有可能输出最大数量的控制脉冲。在所需的参考点,按“设置/取消参考点”开关((I1.4)后,首先调用停比电机的子程序。然后,将参考点标志位M0.3置成1,再把新的操作模式“定位控制激活”显示在输出端Q1.0。
如果I1.4的开关己被激活,而且“定位控制”也被激活(M0.3=1),则切换到“参考点曲线”操作模式。在子程序1中,将M 0.3置成0,并取消“定位控制激活”的显示(Q1 .0=0)。此外,控制还为输出最大数量的控制脉冲做准备。当两次激活I1 .4开关,便在两个模式之问切换。如果此信号产生,同时电机在运转,那么电机就自动停机。
实际上,一个与驭动器连接的参考点开关将代替手动操作切换开关的使用,所以,参考点标志能解决模式切换。
三、定位控制
如果确定了一个参考点(M0.3=1 ),而且没有联锁,那么就执行相对的定位控制。在子程序2中,控制器从输入字节IBO读出对偶码方式的定位角度后,再存入字节MB11。与此角度有关的脉冲数,根据下面的公式计算:


该示例程序所使用的步进电机采用半步操作方式((S=1000)。在子程序3中循环计算步数。如果说现在按“START”按钮(I1.0), CPU将从输出端Q0. 0输出所计算的控制脉冲个数,而且电机将根据相应的步数来转动,并在内部将“电机转动”的标志位M0.1置成1。
在完整的脉冲输出之后,执行中断程序0,此程序将M0.1置成0,以便能够再次起动电机。
四、停止电机
按“STOP"(停止)按钮(I1.1),可在任何时候停止电机。执行子程序0中与此有关的指令。
本程序长度为147个字。




相关文章
发表评论