
本文整理了继保自动化常用断路器遥控分合闸、短路器手动分合闸、保护合闸、保护跳闸、信号开入、隔离开关遥控回路、主编非电量跳闸、母差和失灵回路、双母线隔离...
西门子200Smart PLC实现运动控制,含源码
接线图
2023年10月06日 12:40 555
admin
很多PLC工程师也开始慢慢意识到,掌握一门编程语言,变得越来越重要。
那么PLC工程师学会编程之后,会是一种什么样的体验?
我觉得最直接的体验就是:原理性的东西懂得更多,技术栈更全面,可以自己独立完成项目评估、制图、选型、PLC程序开发调试,到上位机开发,甚至于更上层的WEB端、移动端。
言归正传,本文主要是分享一个工业现场常用的运动控制案例,从硬件选型到程序设计,再从本地调试到上位机开发调试。
这个案例算是一个比较简单的案例,但是可以有效地将PLC与上位机结合起来,对于初学者来说,是一个比较适合的练手项目。
1、硬件选型
控制器:西门子200Smart PLC,型号为ST20(DC-DC-DC)
驱动器:步进驱动器
电机:42mm步进电机
限位:3个限位开关,分别对应原点、左限位、右限位
平台:单轴模组
按钮指示灯:启动、停止、运行状态、3个行程开关(模拟完成信号)
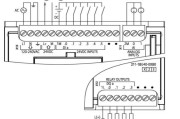
2、硬件接线图

3、PLC程序开发
S7-200 Smart PLC运动控制需要使用运动控制向导来实现,核心程序如下:


4、上位机程序开发
(1)I/O表:PLC程序编程中,会预留上位机接口,上位机I/O表如下所示:

(2)界面设计:上位机UI界面设计

(3)功能实现:上位机主要包含实时状态与数据监控、速度及位置参数设置、系统日志显示、通信参数设置。
- 实时状态与数据监控
本案例与西门子PLC之间的通信方式采用S7通信,使用开源通信库s7.net来实现,基于多线程实现数据的实时采集,并结合实际I/O进行数据解析。
private void PLCCommunication()
{
while (!cts.IsCancellationRequested)
{
byte[] result = plc.ReadBytes(StoreType.DataBlock, 1, 0, 23);
if (result != null && result.Length == 23)
{
this.Invoke(new Action(() =>
{
//这里进行实时状态更新
}));
Thread.Sleep(10);
}
}
}
- 速度及位置参数设置
参数设置采用独立的设置界面,通过窗体传值来实现。代码如下所示:
///
通信参数设置
通信参数为系统参数,采用Winform的Settings来进行配置存储,简单快捷。
代码如下所示:
public SaveDefaultSettingDelegate SaveDefaultSetting;
private void btn_Set_Click(object sender, EventArgs e)
{
CommSet set = new CommSet();
try
{
set.IPAddress = this.txt_IPAddress.Text;
set.CPUType = this.cmb_CPUType.Text;
set.StoreTime = Convert.ToInt32(this.txt_StoreTime.Text);
set.AutoStore = this.chk_AutoStore.Checked;
}
catch (Exception)
{
MessageBox.Show("请检查数据格式是否正确","格式错误");
return;
}
SaveDefaultSetting(set);
MessageBox.Show("配置成功,立即生效", "配置成功");
this.Close();
}
5、写在后面
近几年, 随着越来越多的设备开始加入IIoT 网络(Industrial Internet of Things,工业物联网简称IIoT),IT与OT之间的界限将逐渐消失,直到成为一个或相同的系统为止。
为了便于大家更好地学习这个项目,我们将通过集训营的方式演示整个项目的部署及开发,通过完整的项目分析及编写,即使你是零基础,也能带你实现项目功能。
原文:https://www.cnblogs.com/xiketang/p/16281309.html
相关文章


发表评论