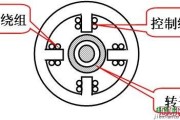
伺服电动机的工作原理及作用伺服电机的作用是驱动控制对象。被控对象的转距和转速受信号电压控制,信号电压的大小和极性改变时,电机的转动速度和方向也跟着变化...
PID算法控制小车直线行驶
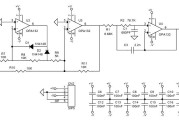
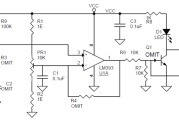
接线图
2023年10月06日 12:40 372
admin
前言:
开始之前先要说为什么要采用PID的算法来控制小车。玩过小车的DIY爱好者们都会碰到这样一种情况:为什么本该直线行驶的小车走着走着轨迹就会发生偏移,即所谓的“走不直”。
小车走不直的原因有:两个电机本身的驱动特性不可能完全相同,两个电机外形大小不可能是完全一致,组装时精度也会出现差异,另外轮胎在滚动时打滑、遇到细小的障碍物等因素都会造成左右轮的速度出现差异,从而走不直。开环控制是无法消除左右轮的速度误差的,因为上述的扰动是随机的。
要想小车走一条直线,唯有实现闭环控制,当小车受到扰动时能对左右轮及时给予反馈,修正两轮的速度偏差,从而可以走出一条直线。PID算法就是一种闭环控制算法,实现PID算法需得从硬件上实现闭环控制,即存在反馈,所以采用的是带测速装置的电机。
项目简介:
本项目采用的是PID控制算法来修正小车行走时两轮的速度偏差,实现小车可以走直线。小车是使用一个安卓App来控制小车的行走路径,App通过App Inventor2来进行编写。
完成作品图:



需要用到的材料:
1. Arduino Uno
2. Arduino Uno的扩展板
3. DFRobot L298 双路2A直流电机驱动板
4. HC-05或HC-06的蓝牙模块
5. 坦克小车底盘
6. 两个带霍尔传感器的电机
7. 锂电池
8. 杜邦线若干


软件部分:
1. Arduino IDE
2. App Invent
附件内容截图:

相关文章



发表评论