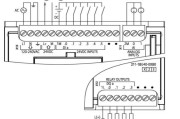
西门子S7-1200是一款紧凑型、模块化的PLC,可完成简单逻辑控制、高级逻辑控制、HMI 和网络通信等任务。对于需要网络通信功能和单屏或多屏HMI的...
三菱PLC基本指令编程经典案例!
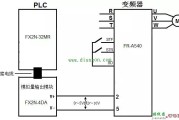
接线图
2023年01月25日 17:47 425
admin
三相异步电动机连续与点动混合控制线路

在工程技术中,生产机械除了需要连续控制,还需要点动控制,如机床调整刀架和对刀、立柱的快速移动、工件位置的调整等。请分析该控制线路的控制功能,并用FX2N系列PLC对该控制线路进行技术改造。
(1)控制要求分析
1)按下起动按钮SB2,三相异步电动机单向连续运行;
2)按下停止按钮SB1,三相异步电动机停止运转;
3)按下点动按钮SB3,三相异步电动机实现点动控制;
4)具有短路保护和过载保护等必要保护措施。
(2)控制系统程序设计
1)I/O地址分配

2)硬件接线图设计

3)控制程序设计

a)梯形图
b)指令语句表
三相异步电动机顺序控制线路

在工程技术中,生产机械除了需要单向控制、正、反转等控制外,还需要顺序控制。请分析该控制线路的控制功能,并用FX2N系列PLC对该控制线路进行技术改造。
(1)控制要求分析
1)按M1→M2顺序起动,即按下起动按钮SB1,M1起动后,才能按下起动按钮SB2,再起动M2。
2)按下停止按钮SB3,三相异步电动机M1、M2同时停止运转;
3)具有短路保护和过载保护等必要保护措施。
(2)控制系统程序设计
1)I/O地址分配

2)硬件接线图设计

3)控制程序设计

a)方案一
b)方案二
工作台自动往返控制

在工程技术中,生产机械自动往返控制得到广泛应用。请分析该控制线路的控制功能,并用FX2N系列PLC对该控制线路进行技术改造。
(1)控制要求分析
1)工作台工作方式有点动控制(供调试用)和自动连续控制两种方式。
2)工作台有单循环与连续循环两种工作状态。工作于单循环状态时,工作台前进、后退一次循环后停在原位;工作于连续循环状态时,工作台由前进变为后退并使撞块压合SQ1为一次工作循环,循环8次后自动停止在原位。
3)具有短路保护和电动机过载保护等必要的保护措施。
(2)控制系统程序设计
1)I/O地址分配

2)硬件接线图设计

3)控制程序设计

a)梯形图
b)指令语句表
由图可见,该控制器控制对象时工作台,其工作方式有前进和后退,电动机正转时,通过丝杠使工作台前进;电动机反转时,通过丝杠使工作台后退。因此,基本控制程序是正反转控制程序。
①工作台自动往返控制
工作台前进中撞块压合行程开关SQ2后,SQ2常开触点闭合,输入继电器X6常闭触点断开,输出继电器Y0失电复位,电动机停止运转,工作台停止前进。同时X6常开触点闭合,定时器T1开始计时,计时5s后,T1常开触点闭合,输出继电器Y1得电,电动机反转,驱动工作台后退,完成工作台由前进转为后退的动作。同理,撞块压合行程开关SQ1后,工作台完成由后退转为前进的动作。
②点动控制
在本例程序中,采用开关SA1(X0)实现点动/自动控制转换,即利用输入继电器X0常闭触点与实现自锁控制的常开触点Y0、Y1串联,实现点动/自动控制的选择。SA1闭合时,X0常闭触点断开,使Y0、Y1失去自锁作用,从而实现系统的点动控制。此时电动机工作状态由按钮SB2、SB3控制。
③单循环控制
在本例程序中,采用开关SA2(X4)实现单循环控制。当SA2闭合时,输入继电器X4常闭触点断开,与其串联的T0常开触点失去作用,即在T0常开触点闭合后,输出继电器Y0线圈也不能得电,工作台不能前进。当SA2断开时,X4常闭触点复位,程序实现连续循环功能。
④循环计数控制
在本例程序中,采用计数器累计工作台循环次数,计数器的计数输入信号由X5(SQ1)提供。梯形图中X2为计数器驱动输入条件,X2闭合时计数器C0清零,为计数循环次数准备。SQ1被压合8次后,X5便通断8次,则C0就有8个计数脉冲输入,其常闭触点断开,输出继电器Y0线圈失电,工作台停在原位。
⑤保护环节控制
工作台自动往返控制必须设置限位保护,SQ3、SQ4分别为后退和前进方向的限位保护极限开关。当SQ4被压合后,X10常闭触点断开,Y0常开触点复位断开,工作台停止前进,实现限位保护功能。同理,压合SQ3后可实现后退限位保护功能。
车库自动开关门控制器

(1)控制要求分析
1)当行人(车)进入超声波发射范围内,开关便检测出超声回波,从而产生输出电信号(S01=ON),由该信号起动接触器KM1,电动机M正转使卷帘上升开门。
2)在装置的下方装设一套光敏开关S02,用以检测是否有物体穿过库门。当行人(车)遮挡了光束,光敏开关S02便检测到这一物体,产生电脉冲,当该信号消失后,起动接触器KM2,使电动机M反转,从而使卷帘开始下降关门。
3)利用行程开关SQ1和SQ2检测库门的开门上限和关门下限,以停止电动机的转动。
4)具有短路保护和联锁保护等必要保护措施。
(2)控制系统程序设计
1)I/O地址分配

2)硬件接线图设计

3)控制程序设计

a)梯形图
b)指令语句表
由图可见,当行人(车)进入超声波发射范围时,S01接收超声回波,S01常开触点闭合,输入继电器X0常开触点闭合,输出继电器Y0常开触点闭合,实现输出驱动和自锁功能,此时Y0端口外接的接触器KM1线圈得电,其主触点闭合,电动机M正转使卷帘上升,实现自动开门控制功能。当卷帘上升碰到开门上限开关SQ1时,输入继电器X2常闭触点断开,输出继电器Y0常开触点复位,电动机M停止正转,开门结束。
当行人(车)遮挡了光束,光敏开关S02便检测到这一物体,产生电脉冲,输入继电器X1常闭触点闭合,但此时不能关门,必须在此信号消失后才能关门,因此,采用脉冲下降沿微分指令PLF,保证在信号消失时起动输出继电器Y1,实现自动关门控制功能。当关门下限开关SQ2被卷帘碰撞时,输入继电器X3常闭触点断开,输出继电器Y1断电复位,电动机M停止反转,关门结束。电路自动进入待机状态。
水塔、水池水位自动控制器

(1)控制要求分析
1)当水池水位低于水池低水位界限时,液面传感器的开关S01接通(ON),指示灯1闪烁(1次/秒),电磁阀YV打开,水池进水。当水位高于低水位界限时,开关S01断开(OFF),指示灯1停止闪烁。当水位升高至高水位界限时,液面传感器使开关S02接通(ON),电磁阀门YV关闭,水池停止进水。
2)如果水塔水位低于低水位界限时,液面传感器的开关S03接通(ON),指示灯2闪烁(2次/秒);当此时S01为OFF,则电动机M运转,水泵抽水。当水位高于低水位界限时,开关S03断开(OFF),指示灯2停止闪烁。当水塔水位升高至高水位界限时,液面传感器使开关S04接通(ON),电动机停止运行,水泵停止抽水。
3)电动机由接触器KM进行控制。
(2)I/O地址分配

(3)硬件接线图设计

(4)控制程序设计

a)梯形图
b)指令语句表
由图可见,当水池水位低于低水位界限时,液面传感器的开关S01闭合,输入继电器X0常开触点闭合,输出继电器Y0线圈通电,其常开触点闭合,实现输出驱动和自锁功能,此时Y0端口外接的电磁阀门YV打开,水池进水。同时,液面传感器的开关S01闭合时,由定时器T0、T1组成的周期为1s的闪烁电路工作,驱动输出继电器Y1工作,水池低水位指示灯1闪烁。当水位升高至水池高水位界限时,液面传感器使开关S02接通,电磁阀门YV(Y0)关闭,停止进水。
水塔水位控制与水池水位控制工作原理相似,读者可自行参照分析。
相关文章

发表评论