
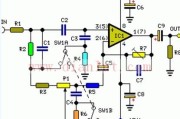
所谓音调控制无非是让音频范围内各频段信号按照使用者的意愿加强一些或减弱一些,也就是某些频率段信号增益高一些或低一些。至于电路,可以说是千变万化,...
2024-03-08 234 控制器
作为调压控制器中的一种电磁阀控制器以再循环式的方式运转。根据传感器提供的电压信息,经电子控制器提供给控制线圈大小不同的电流,在电磁力作用下,控制柱塞(可移动铁心)的位置。为了起到增压、保压、减压的作用我们将柱塞分上、中、下三个位置安装,改变三个阀口之间的通路。 电磁阀控制器常规运转如下:
首先常规制动过程。常规制动过程电磁阀线圈不通电,柱塞位于下部,柱塞中心通道与制动轮缸油路直接连通,制动主缸可直接控制制动轮缸的制动压力,使得电机与泵不工作。 然后保压过程。给电磁阀输入较小电流,柱塞位移到中部位置,三条油路均截断不通,使其制动压力维持不变。
其次减压过程。给电磁阀线圈输入额定最大电流,柱塞位移至上部电磁阀内,制动轮缸与储油器接通,制动液回流储油器,轮缸减压。这时候,电机与泵启动,把储油器中的低压油加压后输送至制动主缸,为下一防抱增压阶段做铺垫。
最后加压过程。电磁阀断电后,柱塞在回位弹簧的作用下,位移至初始位置,主缸和轮缸再次接通。如制动踏板上持续维持压力不变,主缸高压再次进入轮缸,轮缸压力又迅速提高,及其快速运转。
线性变化作为一个可变电阻分压器连接到LED的驱动程序(作为电磁PWM驱动器操作)DIM输入,数字电位器的行为。该电路驱动直流电磁铁范围从6V到40V直流注册,只用电磁铁的6V至40V直流电源。
比例控制液压系统中发现一些工业电磁铁通常是驱动微控制器或可编程逻辑控制器(PLC)。这种复杂的驱动程序通常需要几个不同的逻辑和控制电源电压。 (该比例控制的目的是将电磁阀柱塞到任意位置并离开那里。)一套和拉倒电磁驱动,但是,应该不需要昂贵的PLC或一个微控制器的处理能力。理想的情况下,它应该工作在电磁自己的电源电压。
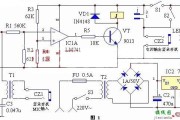
在图1中的电路是否符合这些要求,同时只占用一个小型表面贴装足迹。 U2是350mA的驱动器,带有内置模拟和PWM调光控制(MAX16804可),通常用于驱动高亮度发光二极管。在此应用中,它的开漏输出(OUT)和电流检测端子(CS)的直接连接到电磁铁终端。电磁阀最大电流由R6设置。该电路驱动直流电磁铁范围从6V到40V直流注册,只用电磁铁的6V至40V直流电源。这是测试使用的是LEDex 24V的拉线圈,额定电流高达二百九十毫安。

图1。这种小型,表面贴装,数字驱动电路提供了一个比例电磁铁驱动器。
U1的(MAX5474)是一个32抽头,非易失,线性变化数字电位器。作为一个可变电阻连接,其内部形成一个100kΩ的可变电阻与R5分压器产生一个在U2的DIM输入为0V至3.17V模拟电压。激活后通过抑制SW1的电位器和设置使用SW2的变动的方向(打开了,为下关闭),你可以增加此与各SW3的切换(SW1的关闭)电压。第三个步骤可用,因此32压和释放的SW3的循环遍历范围从0V至3.17V。公式1给出了在滑动端的位置上在点心(的VDIM)近似电压:
VDIM ≈ 5V((N - 1)3225.8Ω)/((N - 1)3225.8Ω + R5)(Eq. 1)
其中R5的=56.2kΩ,N是N个抽头步骤(0≤n时≤32)。 R3中,R4和C2的反跳的SW3的脉冲递增/递减。再次,使按SW1的变化,按SW2(或不)控制的方向。 U2乐队在200Hz电磁开关,可变的PWM占空比在其价值DIM引脚电压而定。
U2是由电磁阀的电源供应器(在这种情况下24V的)。 U1的是由U2的V5的针,5V电源,可高达2mA的电流源。电容C1,C4和C5的旁路在各自的IC引脚的电源电压。可选的大容量含率电容(C3)可能需要如果电路是从直流源的距离。
为了适应行动U2的PWM应用,续流二极管D1允许电流通过电磁线圈流通每次的电源开关关闭(每秒200次)。 U2提供了间接的短路和热保护,以防止其对过流和短路损坏的线圈或附加条件导致短路输出。通过连接跳线器JU1控制的EN输入(引脚19)的VIN(启用)或GND(禁用)U2。表1总结了图1不同立场的电磁电路条件。
表1。电磁阀驱动电路数据

图2显示了电磁驱动电压和电流脉冲产生电路时在26%占空比工作。这代表了电磁占空比电压和电流要求32.4mARMS电磁线圈通电拉在电磁柱塞的0.0312in距离。

图2。从图1这些电磁电压和电流波形产生占空比为26%和76%的占空比0.3215in的0.0312in柱塞的距离。
图3显示了电磁驱动电压和电流脉冲产生电路时在76%的工作周期运行。这代表了电磁占空比电压和电流要求211mARMS电磁线圈通电拉在电磁柱塞的0.312in的距离。

图3。这些线圈的电压和电流的波形图1电路产生一个0.31in柱塞的距离。
相关文章



发表评论