
文章首先介绍了触摸屏的实现原理,然后介绍了触摸屏芯片AD7873的特性,在此基础上设计了ad7873与...
解读三种嵌入式系统控制电路设计 —电路图天天读(208)
接线图
2023年02月01日 21:08 407
admin
嵌入式系统是一种“完全嵌入受控器件内部,为特定应用而设计的专用计算机系统”,为控制、监视或辅助设备、机器或用于工厂运作的设备,核心是由一个或几个预先编程好以用来执行少数几项任务的微处理器或者单片机组成。本文将介绍三种基于嵌入式技术应用电路设计,分别是电机驱动控制器、SOHO路由器电路与嵌入式语音识别电路。
电机驱动控制器
采用DSP 芯片和外围电路构成速度捕获电路,电机驱动控制器采用微控制芯片和外围电路构成了电流采样、过流保护、压力调节等电路,利用CPLD实现无刷直流电机的转子位置信号的逻辑换相。赛车刹车控制器是由防滑控制器和电机驱动控制器组成。两个控制器都是以DSP芯片为核心。防滑控制器主要是以滑移率为控制对象,输出给定的刹车压力,以 DSP芯片为CPU,外加赛车和机轮速度信号调理电路等。电机驱动控制器主要是调节刹车压力大小,并且控制电动机电流大小,也是以DSP芯片为CPU,再加外围电路电动机电流反馈调理电路、过流保护电路、刹车压力调理电路、四组三相全桥逆变电路等构成电机驱动控制器。
信号处理电路:赛车防滑控制器主要是以滑移率为控制对象,防止赛车打滑,由滑移率的偏差大小调节后输出压力参考值,以跟踪给定的滑移率大小。防滑控制器上必须有赛车前轮和刹车机轮速度信号的调理电路,主要是为了得到反馈的滑移率。赛车速度信号是以自由滚动的赛车前轮速度信号代替。在赛车的前轮与刹车机轮上都装有测速传感器,当轮子转动时,测速传感器会产生正弦波形式的交流信号,机轮每转动一圈,测速传感器发出50个周期的正弦交流信号。正弦交流信号的振幅随轮子速度的变化而变化,其信号为偏压2.5V,峰值为0.3V,最大信号幅值不超过5V的正弦波信号。
 第1张")
电流采样及过流保护电路:无刷直流电动机的电流是通过功率驱动电路母线上的电阻进行检测的。母线上面的电阻是由两个0.01Ω的功率电阻并联,采样电路是通过这两个并联的采样电阻进行电流采样的,采样电阻将电流信号转换为电压信号,电压信号送到电流监控芯片进行放大,然后经过由OPA2344构成二阶有源滤波电路滤波,最后得电流反馈信号,直接送到A/D转换器。
 第2张")
硬件过流保护电路,对系统的正常工作起到很重要的作用,主要是对功率器件MOSFET和电动机的保护。系统还带有软件保护功能,过流信号 OVCURX送到 DSP的输入引脚,当OVCUR为高电平时,DSP会产生电机控制转动信号ENABLE关断逻辑信号,使电机停转。芯片IR2130自身带有过流保护功能。
SOHO路由器电路
利用Linux内核支持IPMasquerade技术实现NAT转换,实现多台主机共享访问因特网。IPMasquerade工作原理:客户机将实现IPMasquerade的Linux机器设置为缺省网关,当IPMasquerade的Linux机器收到客户机的数据包时,对其进行改写,将源地址替换为自己的IP地址,将源端口号换成一个新的端口号,并且对该过程进行记录;当接收到响应数据包时,如果其端口号正是先前所指定的端口号则再对该数据包进行改写,将其目的IP地址及目的端口号替换为原来记录的客户机IP地址和端口号,然后再发送给客户机。
 第3张")
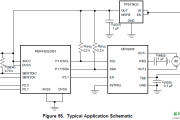
S3C2410X微处理器通过系统总线连接FLASH和SDRAM构成存储系统,系统上电后,微处理器从FLASH中读取初始化程序,SDRAM为程序运行和数据处理和转发提供临时存储空间。以太网控制芯片DM9000,经单端口隔离变压器和RJ45接口与互联网相连。DM9000 通过MII(独立媒体接口)与交换控制芯片RTL8305SC的PORT4口相连,RTL8305SC经过4端口隔离变压器和四个RJ-45接口连接局域网集线器,交换机或电脑,进行数据交换或通过微处理器控制与广域网连接。
DM9000与S3C2410X、RJ45接口电路如图所示,DM9000E芯片的引脚INT与S3C2410X芯片的外部中断信号 EINT14相连,S3C2410X片选信号nGCS4和地址线MA2分别连接DM9000的AEN引脚和CMD引脚。SA6到SA0对应地址总线,而 SA9与SA8引脚设置为高电平,SA7引脚设置为低电平,用来片选DM9000;3C2410X的nOE引脚连接DM9000的读引脚IOR#,nWE 引脚连接DM9000的写引脚IOW#,并将S3C2410X数据线MD[0..15]与DM9000的数据线SD[0..15]连接,实现数据传输。将 RTL8305S第5端口设定为一个MII接口与以太网控制芯片DM9000RMII接口相连,RTL8305S与四端口隔离变压器和RJ45接口相似。
嵌入式语音识别电路模块
服务机器人以服务为目的,因此人们需要一种更方便、更自然、更加人性化的方式与机器人交互,而不再满足于复杂的键盘和按钮操作。基于听觉的人机交互是该领域的一个重要发展方向。目前主流的语音识别技术是基于统计模式。然而,由于统计模型训练算法复杂,运算量大,一般由工控机、PC机或笔记本来完成,这无疑限制了它的运用。嵌入式语音交互已成为目前研究的热门课题。 嵌入式语音识别系统和PC机的语音识别系统相比,虽然其运算速度和内存容量有一定限制,但它具有体积小、功耗低、可靠性高、投入小、安装灵活等优点,特别适用于智能家居、机器人及消费电子等领域。
模块的核心处理单元选用ST公司的基于ARMCortex-M3内核的32位处理器STM32F103C8T6。本模块以对话管理单元为中心,通过以LD3320芯片为核心的硬件单元实现语音识别功能,采用嵌入式操作系统μC/OS-II来实现统一的任务调度和外围设备管理。经过大量的实验数据验证,本文设计的语音识别模块具有高实时性、高识别率、高稳定性的优点。
语音识别电路
 第4张")
图3为语音识别部分原理图,参照了ICRoute发布的LD3320数据手册进行设计。LD3320的内部集成了快速稳定的优化算法,不需外接Fla-sh、RAM,不需要用户事先训练和录音而完成非特定人语音识别,识别准确率高。图中,LD3320采用并行方式直接与 STM32F103C8T6相接,均采用1kΩ电阻上拉,A0用于判断是数据段还是地址段;控制信号,复位信号以及中断返回信号INTB与 STM32F103C8T6直接相连,采用10kΩ电阻上拉,辅助系统稳定工作;和STM32F103C8T6采用同一个外部8 MHz时钟;发光二极管D1、D2用于复位后的上电指示;MBS(引脚12)作为麦克风偏置,接了一个RC电路,保证能输出一个浮动电压给麦克风。
编辑点评:嵌入式语音识别电路模块对话管理单元为中心,通过以LD3320芯片为核心的硬件单元实现语音识别功能,采用嵌入式操作系统μC/OS-II来实现统一的任务调度和外围设备管理,设计的语音识别模块具有高实时性、高识别率、高稳定性的优点。文中对电机驱动控制器电路、SOHO路由器电路与嵌入式语音识别电路进行了深行次分析,请读者细细品读。
电子发烧友六月《嵌入式技术特刊》荣邀各界资深专家,与您一探究竟!
相关文章



发表评论