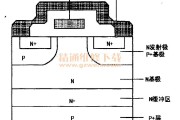
IGBT(Insulated Gate BipolarTransistor)是绝缘栅双极型晶体管的简称,是一种集功率型场效应管和电力晶体管的优点于一...
小型舞蹈机器人的驱动电路设计
接线图
2023年02月01日 21:10 303
admin
机器人舞蹈比赛是一项具有极强观赏性和趣味性的比赛。比赛规则要求参赛机器人在有限的场地和时间内,配合音乐完成动作。由于要求机器人既要充分利用场地,又不能超时和越界,因此,舞蹈机器人集成了多学科前沿技术,它的设计涉及了机电一体化技术、检测和传感技术、精密机械加工和精密机械传动技术、现代化控制技术和管理技术、计算机程序控制技术等多个方面。
系统中,直流电机共有四路,分别用于机器人底盘、头部的转动以及身体的升降,舵机有两路,用于花瓣打开。本设计从实际出发对不同电机采取了不同的驱动方式。舵机驱动电流仅十几微安,可以直接使用单片机端口进行驱动,而直流电机工作电流较大,瞬态电流接近1A,因此需要采用专用电机驱动芯片。此外由于采用了3V与7V两种规格的直流电机,其中7V直流电机驱动信号直接采用驱动芯片输出,3V直流电机则需对驱动芯片输出作降压处理,因此,控制芯片选用了Atmel公司的AT89C52单片机。
驱动模块电路设计
本系统有四路直流电机和两路舵机,由于两者的工作电流相差较大,故在硬件上将两者独立。

由于舵机自身带电源和地引脚,对其驱动只需给出控制信号即可,故可直接用单片机的端口作控制信号线,因而硬件十分简单,设计时只要通过接口用光耦隔离输出便可直接控制两路舵机,图中即用于实现这部分功能。本系统共有四路直流电机,其中三路采用7V供电,一路采用3V供电,因而工作电流较大,瞬时值可达1A以上,为此,设计中选用了L298系列芯片来完成驱动。图是两路电机的驱动电路,为了节约单片机的端口资源,每路直流电机的正/反转信号控制线均通过一个反相器共用一条单片机口线。

由于本系统中3V直流电机的工作电流约为800mA,为了简化设计,降低成本,可以考虑直接使用L298N来驱动,而输出电压约6V,因此必须将其降至3V才能直接驱动3V直流电机。本系统仅要求此直流电机单向转动,故可采用稳压二极管进行稳压处理。利用稳压二极管进行稳压时,多采用并联型稳压方式。
本系统是专为某型舞蹈机器人设计的,因此,软件的工作大部分是通过发送各种指令来驱动相应的电机以使其转动,从而实现预定编排的舞蹈动作。直流电机、舵机的控制均采用PWM方式,软件设计本文不作详解。系统在实际应用中具有可靠性高、控制到位、抗干扰性强的特点,由其构成的舞蹈机器人曾在全国舞蹈机器人大赛中一举夺冠。
相关文章
发表评论