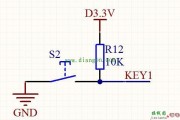
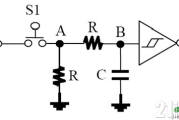
是不是经常听别人讲,加个试试看,加个下拉电阻试试看,是不是还在疑惑上下拉电阻是什么,该怎么用,什么时候用,有什么用途? 1.什么是上下拉电阻 ...
2024-03-16 263 单片机
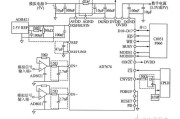
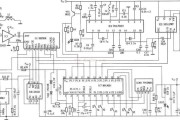
AT89S51 的编程方式可分为并行及串行模式。由于目前PC台式及及笔记本已经逐渐取消并口,因此并口编程器已经逐渐被淘汰。采用USB接口的ISP编程器比较适合实验之用。本书所附赠的电路就是以USB ISP串行模式来对AT89S51进行编程的,其电路如图所示。图为AT89S51 USB ISP编程器电路图:

USB编程器电路
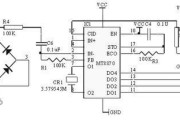
本实验板电路采用USB接口对AT89S51进程编程。除了通过USB接口编程外,也通过USB接口为电路板提供5V电压。所以在实验过程中,不用再额外使用外接电源。USB编程电路如图所示。
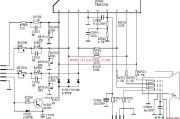
CH341A是一个USB总线转接芯片,通过USB总线提供异步串口、打印口、并口,以及常用的2线和4线等同步串行接口。CH341A采用SOP-28无铅封装,具体功能由复位后的功能配置决定,同一引脚在不同功能下的定义可能不同。CH341芯片正常工作时需要外部向XI引脚提供12MHz的时钟信号。一般情况下,时钟信号由CH341内置的反相器通过晶体稳频振荡产生,外围电路只需在XI和XO引脚之间连接一个12MHz晶体,并为XI和XO引脚对地连接振荡电容。CH341芯片支持5V电源电压或者3.3V电源电压。当使用5V工作电压时,CH341芯片的VCC引脚输入外部5V电源,第9脚(V3引脚)应该外接容量为4700pF或者0.01uF的电源退耦电容。CH341 第10、11脚连接到USB数据总线。第13、14脚外接12MHz晶体,为芯片提供时钟。第16、18、20、22脚分别接300Ω的限流电阻,作为 RST、SCK、MOSI、MISO信号输入/输出。在使用CH341A的USB转ISP功能时,第23脚必须接地。第28为电源5V输入,接退耦电容,可使让芯片工作更稳定。

图3.12 USB编程器电路图
在图3.12里,USB1为与电脑连接的USB插座。此USB插座共有4个脚,分别为+5V、D-、D+及GND。+5V及GND是本电路板的电源来源。R3为限流电阻,此电阻的取值需要根据实际情况确定。在使用此电阻时,应保证后端的CH341A及AT89S51芯片供电电压大于4.5V。在保证接入的元件接线正确及电路整体消耗电流小于500mA的情况下,此电阻可以不接,直接用短线连接即可。CH341A芯片通过USB接口和USB连接线完成与电脑的数据传输。
相关文章
发表评论