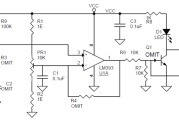
这里介绍的项目是一个模拟电容式接近传感器。该电路来自德州仪器 (TI 应用笔记。大多数传统电容式接近传感器产生“1”或“0”输出,该电路产生直流输出,...
配套Lego组合机器人的超声波防撞电路设计
接线图
2023年02月01日 21:10 269
admin
这种探测器的依据是超声波具有很强的方向性。发送的传感器发出连续信号。在这个装置之前约几米的适当物体可以把相当强的信号反射回到接收传感器。发送和接收传感器只相隔大约50毫米,所以方向性强的超声波保证从发射器到接收器之间的直接耦合波显得微不足道。这个电路从RCX装置获得电源,它就和一种标准Lego探测器一样连接到RCX装置的一个输入端口。并没有特别支持采用RCX代码或者 Mindstorms套件通常共用的其他编程语言的超声波探测器。因此,可以利用软件以标准有源探测器。例如Lego光探测器的相同基本方式操纵它。
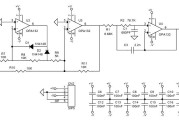
图中是超声波探测器的整个电路图。二极管列阵由D1至D6组成,而标准的桥式整流器则由D1至D4组成。这个整流器连同滤波电容C3产生7伏特电源。桥式整流器提供全波整流,所以电路怎样连接RCX装置都没有关系。

RCX装置内部的上拉电阻通常使输入端子处于高电位。D5和D6使IC1a的输出把RCX端口输入端拉低至0伏电压。这个装置怎样连接RCX装置也是没有关系的。IC1a的输出通过两个二极管的任何一个连接端口的带电输入端。在输入提供电源的时间内,两个二极管的其中一个就会阻断电源,因此只有极小电流流过两个二极管。在这些时间内,lC1a的输出连接电源,但R1却阻止过量的输出电流流入IC1a的输出级。
IC1a是缓冲放大器,它是普通的电压跟随级。IC1b是直流放大器。它以同相模式操作,反馈电阻R2和R3把它的闭环电压增益调整倒3.7。要注意,lC1采用的LM358N是用在没有负电源的直流电路的。其他大多数运算放大器并不能提供这里要求的很低输出电压,所以不建议使用代用器件。TR1放大接收传感器Mic1的输出。TR1用简单的共射极放大器,它提供超过40dB的电压增益。C2将其输出耦合到D7和D8组成的半波整流器电路。C1和 R4组成平滑滤波电路。发射器电路只是采用标准震荡配置的555时基电路(IC2)。RCX装置可以从每个输入端提供的最大电源电流是相当有限的,所以IC2最好采用低电源的 555。否则就会出现负载太大的风险以致获得不合适的电源电压。VR1是频率控制器,通常调节它而使电路产生最佳性能。不过,如果需要降低灵敏度,可以故意使它偏离最佳频率。
最后检查过接线之后,就可以进入调试阶段。先把VR1调整到差不多中央的位置。测试和调试探测器的最好方法是把它连接到装置的输入。并且把输入调到使用有源探测器,例如Lego的光探测器进行工作。如果把输入调整到使用无源探测器,例如触摸式探测器,则就完全不能工作。因为它不会从输入端口接收到较大的电源电压。把探测器连接合适的输入端口,并且接通RCX装置。按住RCX装置上的观看按钮直至箭头游标指出显示器正在检测正确的输入端口为止。探测器应该多少有点发挥作用,把传感器对准大的空间时可以获得高的读数,如果把手掌放在传感器前面就可以获得低得多的读数。最大读数可能低于100,通常大约在80到90之间。最小读数可能是零或者接近零。如果它多少能工作,下一步就是调节VR1而取得最佳性能。
先使探测器面对墙壁,然后移动装置距离墙壁足够远而使显示器产生高的读数。接着,调节VR1而获得尽可能低的读数。如果是这样,再把探测器移离开墙壁而恢复较高的读数,然后再调节VRl而获得尽可能低的读数。可能需要重复这个过程几次才会产生尽可能大的工作距离。这个装置的最大工作可能是2米左右,如果觉得距离太远了,可以调节VR1让它偏离最佳工作点。假如需要大约O.5米的最大工作距离。把探测器方在距离墙壁O.5米之处。然后调整VR1而获得低读数,不过是大于零的读数。这样,探测器大致会以所需要的工作距离工作。
相关文章



发表评论