这里介绍的项目是一个模拟电容式接近传感器。该电路来自德州仪器 (TI 应用笔记。大多数传统电容式接近传感器产生“1”或“0”输出,该电路产生直流输出,...
机器人接触式物体探测电路设计 - 机器人技术电路设计图集锦
接线图
2023年02月01日 21:10 274
admin
TOP6 机器人接触式物体探测技术电路设计
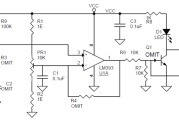
下图中给出使用导电橡胶片的比较合理的接口电路。导电橡胶片和一个3.3k电阻串联在地与电源正电压之间形成了分压器。当导电橡胶片受压时,传感器的输出端的电压就会变化。传感器的输出端就是压电片和电阻之间的一点,此信号连接到比较器339的反向输入端引脚上。当压电片的电压超过了比较器的参考电压时,比较器输出状态改变,就表示碰撞发生了。这个比较器的输出可以用来驱动一个控制马达方向的继电器上或者直接连接到一个微处理器或计算机端口上。

多路碰撞开关
当有许多开关或者近距离探测设备布置在机器人的周围时会怎样呢?不得不把每个开关的输出连接到电脑里,但是那样做浪费了很多外设端口。一个比较好的解决办法是利用一个优先编码器或者多路转换器。这两个方案允许在一条公共控制线路上连接多个开关。机器人的微处理器或计算机将查询这条控制线,而不是每个开关或近距离探测设备。
使用优先编码器电路设计
下图中的电路使用了一块74148优先编码器集成块。

集成块的输入端就是那些开关的输出。 当一个开关闭合,相应的二进制编码就会出现在A-B-C输出引脚处。对于优先编码器,只有开关中最高的值才能在输出端显示出来。换句话说,如果开关4和7都闭合了,那么输出端只能反应引脚4闭合。
使用电阻分压排电路设计
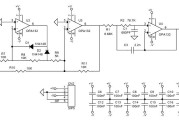
如果机器人的计算机或者微控制器中有模一数转换器(ADC)或者可以添加一个,就能以另一种技术实现多路开关接口:电阻分压排。概念十分简单,像图18 所示。每个开关通过一个电阻的一端接地,而+V电压串接另一电阻到各开关上。多个开关则并行接入ADC的输入端,如图所示。这些电阻形成了一个分压器。由于每个电阻值都不同,所以当某一开关闭合时,对应的电压值都是独一无二的。注意,由于电阻是并联的,所以一次可能有多个开关闭合。从而得到一个中间值。要对连接每个开关的电阻值进行摸索实验以获得最大的灵活性。

相关文章



发表评论