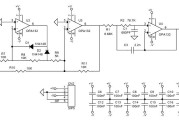
这里介绍的项目是一个模拟电容式接近传感器。该电路来自德州仪器 (TI 应用笔记。大多数传统电容式接近传感器产生“1”或“0”输出,该电路产生直流输出,...
吸尘机器人控制系统电路设计 - 机器人技术电路设计图集锦
接线图
2023年02月01日 21:10 452
admin
TOP8 吸尘机器人控制系统电路设计
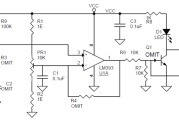
红外接近传感器电路设计
反射式光电开关是由红外LED光源和光敏二极管或光敏晶体管等光敏元件组成,当有障碍物阻拦时光线能够反射回来,输出为低电平信号;当没有障碍物阻拦时,光线不能反射回来,输出为高电平信号。吸尘机器人的近距离红外接近传感器由两组相同的红外发射、接收电路组成。每一组电路可分为高频脉冲信号产生、红外发射调节与控制、红外发射驱动、红外接收等几个部分。通过38kHz晶振和非门电路得到一个38kHz的调制脉冲信号;利用三极管驱动红外发射管(TSAL6200)的发射。发射管发出的红外光经物体反射后被红外接收模块接收。通过接收头(HS0038B)内部自带的集成电路处理后返回一个数字信号,输入到微控制器的I/O口,如图3所示。接收头如果接收到38kHz的红外脉冲就会返回输出低电平,否则就会输出高电平。通过对I/0口的检测,便可以判断物体的有无。

两种电机控制系统电路设计
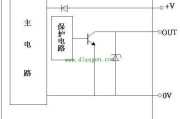
在小功率系统中,直流电机线性特性良好,控制性能优越,适合于点位和速度控制。为了实现直流电机的正反转运行,只需要改变电机电源电压的极性。电压极性的变化和运行时间的长短可以由处理器实现,而提供直流电机正常运行的电流则需要驱动电路。
H桥式驱动电路是比较常用的驱动电路。该设计两个行走驱动电机采用分立器件功率场效应管和续流二极管搭建,成本低,便于散热,如图所示。

用ARM7的P0.8和P0.9来控制电机,这两个管脚都是PWM输出管脚,可以控制电机的速度。该部分主要保证机器人能够在平面内移动,同时轮上带有编码器,可以对行走的路程进行检测。通过航位推算可以实现机器人的转弯,假设机器人光电码盘的分度数为N;控制器收到的脉冲数为m;轮子的直径为D;两个轮子之间的间距为W,则轮子前进的距离即可算得。

清洁机器人作为服务机器人的一种,有着巨大的市场潜力和广阔的应用前景。随着传感技术的发展和微处理器的不断进步,价格也在不断下降。在此研究和设计一个基于ARM7微处理器的清洁机器人控制系统,不仅满足了实用性的要求,而且在不增加成本的基础上为软件提供了良好的硬件支持,为更好的算法和软件升级提供良好的技术支持。若读者对机器人技术感兴趣,不妨多探讨一下未来发展趋势以及最新革新技术走势等等。
相关文章



发表评论