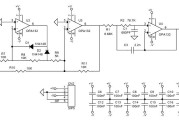
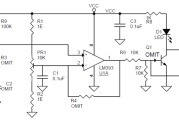
这里介绍的项目是一个模拟电容式接近传感器。该电路来自德州仪器 (TI 应用笔记。大多数传统电容式接近传感器产生“1”或“0”输出,该电路产生直流输出,...
智能小车机器人整体电路设计 - 机器人技术电路设计图集锦
接线图
2023年02月01日 21:10 393
admin
语音输入电路设计
小车的语音输入电路如图所示。其中,VM IC 提供传声器的电源,VSS是系统的模拟地,VCM 为参考电压,1脚和2脚分别是传声器X1 的正极、负极的输入引脚。当对着传声器讲话时,1脚和2 脚将随着传声器输入的声音产生变化的波形,并在SPCE061A 的两个端口处形成两路反相的波形,送到SPCE061A 控制器内部的运算放大器进行音频放大,经过放大的音频信号,通过ADC转化器转化为数字量,保存到相应的寄存器中,然后对这些数字音频信号进行压缩、辨识、播放等处理。

语音输出电路设计
小车的语音输入电路如图所示。其中,VDDH 为参考电压,VSS是系统的模拟地。音频信号由SPCE061A 的DAC引脚输出送到电路的9端,通过音量电位器R9的调节端送到集成音频功率放大器SPY0030, 经音频放大后,音频信号从SPY0030输出经J2端口外接扬声器播放声音。

光电检测电路设计
小车的光电检测电路采用E18-D80NK型号的光电传感器,它集发射和接受于一体,红外发射管向某一方向发射红外线,遇到障碍物后红外线被反射由接收管接受,从而判断出小车的前方是否有障碍物,对障碍物的感应距离可以根据要求通过传感器上的微调旋钮进行调节。传感器前端增加了透镜,利用聚焦作用远距离探测物体。传感器内部集成了放大、比较、调制电路,使传感器受可见光的影响较小,光电检测电路的连接图如图4所示。

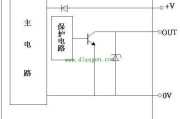
驱动电路设计
小车的驱动电路是一个全桥驱动电路( 图5),Q1,Q2, Q3, Q4四个三极管组成4个桥臂,Q5 控制Q2和Q3的导通和关断,Q6控制Q1 和Q4 的导通和关断,驱动电路分别用于后轮动力驱动电路和前轮方向驱动电路。当1管脚为高电平,2管脚为低电平时时Q1 和Q4 导通,Q2和Q3截止,电动机带动车轮运转; 当1管脚为低电平,2管脚为高电平时时Q1和Q4截止,Q2和Q3导通,电动机带动车轮反向运转。

智能小车系统整体设计
将语音输入电路的1, 2 端口分别连接到SPCE061A控制器的M ICP, N ICN 管脚上; 将语音输出电路的9端口连接SPCE061A的DAC1管脚; 后轮动力驱动电路的1, 2端连接到SPCE061A的IOB8, IOB9管脚,前轮方向驱动电路的1, 2端连接到SPCE061A 的IOB10, IOB11管脚; 光电检测电路的OUT 端连接SPCE061A 的IOB12 管脚,智能小车的整体连接如图6所示。

智能小车的正确识别率在90% 以上,实验过程中发现,影响小车正常辨识的因素主要包括周围环境的噪声、人与小车的距离等,这些需要在今后改进。这种语音控制的智能小车机器人将来不仅可以为人服务,稍加扩展,还可以在多种不适合人作业的场合替代人执行任务。因此这种语音控制小车机器人具有重要的学术研究价值。
相关文章



发表评论