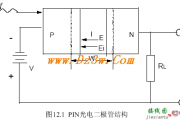
PIN光电二极管是在PN结的P型层和N型层之间夹了一层本征半导体(semiconductor ,形成P-I-N结构而得名,如下图所示:如上图所示,处于...
无线电控制接口电路
接线图
2024年01月28日 08:50 197
admin
这是我们为接口开发(并丢弃!)的电路。由于球童的机械设计,它分为两部分。前半部分是一个速度接口,它简单地将标准无线电控制脉冲宽度转换为模拟电压,该电压被馈送到 4QD 电机速度控制器之一。我知道 - 对于这样一个简单的任务,电路看起来太复杂了,但实际上它正在执行客户要求的其他一些任务。
下半场控制转向。机械设计是一个 3 轮推车,“单轮”实际上是一对间隔很近的轮子,由顶部的主驱动电机驱动提供动力(这是由第一电路控制的电机)。然而,这对是电动旋转装置:第二个电机是转向装置,可以将这对装置旋转 180 度,因此不仅提供转向,还提供方向控制。
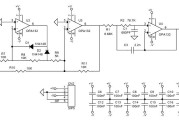
速度接口
 Tr3 和 Tr4 是为 9v1 齐纳二极管供电的电流源,以提供内部电源。带有 6v2 齐纳二极管的 Tr5 为无线电控制接收器提供 5.6 伏电源。该接收器提供两个输出 - 一个用于电机速度控制,另一个用于转向。
Tr3 和 Tr4 是为 9v1 齐纳二极管供电的电流源,以提供内部电源。带有 6v2 齐纳二极管的 Tr5 为无线电控制接收器提供 5.6 伏电源。该接收器提供两个输出 - 一个用于电机速度控制,另一个用于转向。
Tr13 和 14 是电平转换器和脉冲调节器,用于整形无线电接收器的输出脉冲。整形脉冲被馈送到脉冲长度检测器,该检测器由带有 Tr15 和 Tr16 的前 555 个组成。555(提供参考脉冲)由 Tr6 在输入脉冲的上升沿触发。Tr15 的集电极仅在输入脉冲存在时为高电平,而 555 在关闭时为高电平,因此仅当输入脉冲长度长于参考脉冲时,它才会提供脉冲输出。类似地,Tr16 的集电极仅在存在参考脉冲但输入脉冲上没有任何内容时才为高电平。此脉冲表示参考比输入长。
Tr10 和 Tr11 是“泵和保持”电路。Tr11 的最大工作电流为 90 微安(9v,100K),因此其基极电流约为 1/3 微安(假设增益约为 250)。该基极电流通过 3M3 电阻器提供(实际上提供 3 微安 - 绰绰有余)。
因此在最坏的情况下,Tr10 的发射极电流可能为 3 微安。其基极电流约为 10 纳安。假设 Tr9 和 Tr18 不导通,这个基极电流只能来自泄漏 - 或 470n 电容器。这使电容器的放电速率约为 20 毫伏/秒。我们在最长约 30 秒的保持时间之后,认为 600mV 的漂移是完全可以接受的。通过仔细注意细节可以很容易地改善它,如果还可以使用 JFET 来消除基极电流。
因此,在没有任何输入脉冲的情况下,没有参考脉冲,因此两个 10n 电容器上没有脉冲。470n 从泄漏中缓慢充电,输出漂移至零伏。如果输入脉冲到达,则触发参考脉冲。如果参考脉冲太短,正脉冲出现在 10n 电容器上,为 Tr18 的发射极供电。10n 通过二极管充电。当此脉冲停止时,Tr15 导通,对 10n 放电。由于二极管反向偏置,电容器只能从 Tr18 的发射极放电。Tr18的发射极电流也是它的集电极电流,所以放电脉冲使470n电容放电,输出电压升高一点。
因此,实际上这部分电路也是一个上/下阶梯波形发生器,具有两个独立的输入:一个用于上行,一个用于下行 -本站点的其他地方也使用了相同的电路。
脉冲不是单个的,而是脉冲串:经过几个脉冲后,输出电压会发生显着变化。
现在,参考脉冲发生器(555)没有传统的定时电阻,而是一个电流镜(有关电流镜的更多信息)。充电电流从 Tr2 的集电极流出,等于流入 Tr1 的电流。该输入电流有两个分量,一个来自 Rm 的静态部分和一个来自通过 Rp 的输出的反馈分量。这两个都是可调的,可以调节最大电压(最大脉冲宽度)和最小电压(最小脉冲宽度)对应的脉冲宽度。
所以我们有一个带有保持功能的脉宽电压转换器。
电路的底部是超时功能。每个正向输入脉冲同时触发定时周期并将定时电容器钳位到零。因此,定时器输出在脉冲序列开始时变高,但仅在最后一个输入脉冲结束时才开始其计时周期。如果在超时之前没有更多的脉冲到达,定时器将完成其时间周期并通过 Tr19 将输出电压重置为零,并且高尔夫球车停止。
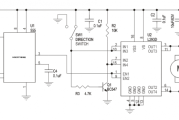
如果这个逻辑有点晦涩,我的想法是拥有一个带有四个按钮和一个速度电位器的小型手持式发射器。一个按钮是“停止”——上面没有包括这个的电路,但它会打开 Tr19,停止机器死机。另一个按钮是“刷新”。这将发送一串脉冲(宽度由速度电位器决定)来设置速度。这个想法是用户每 30 秒左右推动一次,以发送球童,或保持其进度。如果操作员没有及时刷新系统,定时器就会超时。
转向电路
转向电路中的电平转换器和脉冲长度比较器与速度电路中的相同,但输出分别馈送到两个脉冲序列检测器。这些其实和速度控制中的timeout是一样的。当存在脉冲时,计时器的输出为高电平,激活相应的继电器以向左或向右转动转向电机。
转向电路与速度控制电路非常相似,实际上没什么好说的!
概括
下半场控制转向。机械设计是一个 3 轮推车,“单轮”实际上是一对间隔很近的轮子,由顶部的主驱动电机驱动提供动力(这是由第一电路控制的电机)。然而,这对是电动旋转装置:第二个电机是转向装置,可以将这对装置旋转 180 度,因此不仅提供转向,还提供方向控制。
速度接口
Tr3 和 Tr4 是为 9v1 齐纳二极管供电的电流源,以提供内部电源。带有 6v2 齐纳二极管的 Tr5 为无线电控制接收器提供 5.6 伏电源。该接收器提供两个输出 - 一个用于电机速度控制,另一个用于转向。Tr13 和 14 是电平转换器和脉冲调节器,用于整形无线电接收器的输出脉冲。整形脉冲被馈送到脉冲长度检测器,该检测器由带有 Tr15 和 Tr16 的前 555 个组成。555(提供参考脉冲)由 Tr6 在输入脉冲的上升沿触发。Tr15 的集电极仅在输入脉冲存在时为高电平,而 555 在关闭时为高电平,因此仅当输入脉冲长度长于参考脉冲时,它才会提供脉冲输出。类似地,Tr16 的集电极仅在存在参考脉冲但输入脉冲上没有任何内容时才为高电平。此脉冲表示参考比输入长。
Tr10 和 Tr11 是“泵和保持”电路。Tr11 的最大工作电流为 90 微安(9v,100K),因此其基极电流约为 1/3 微安(假设增益约为 250)。该基极电流通过 3M3 电阻器提供(实际上提供 3 微安 - 绰绰有余)。
因此在最坏的情况下,Tr10 的发射极电流可能为 3 微安。其基极电流约为 10 纳安。假设 Tr9 和 Tr18 不导通,这个基极电流只能来自泄漏 - 或 470n 电容器。这使电容器的放电速率约为 20 毫伏/秒。我们在最长约 30 秒的保持时间之后,认为 600mV 的漂移是完全可以接受的。通过仔细注意细节可以很容易地改善它,如果还可以使用 JFET 来消除基极电流。
因此,在没有任何输入脉冲的情况下,没有参考脉冲,因此两个 10n 电容器上没有脉冲。470n 从泄漏中缓慢充电,输出漂移至零伏。如果输入脉冲到达,则触发参考脉冲。如果参考脉冲太短,正脉冲出现在 10n 电容器上,为 Tr18 的发射极供电。10n 通过二极管充电。当此脉冲停止时,Tr15 导通,对 10n 放电。由于二极管反向偏置,电容器只能从 Tr18 的发射极放电。Tr18的发射极电流也是它的集电极电流,所以放电脉冲使470n电容放电,输出电压升高一点。
因此,实际上这部分电路也是一个上/下阶梯波形发生器,具有两个独立的输入:一个用于上行,一个用于下行 -本站点的其他地方也使用了相同的电路。
脉冲不是单个的,而是脉冲串:经过几个脉冲后,输出电压会发生显着变化。
现在,参考脉冲发生器(555)没有传统的定时电阻,而是一个电流镜(有关电流镜的更多信息)。充电电流从 Tr2 的集电极流出,等于流入 Tr1 的电流。该输入电流有两个分量,一个来自 Rm 的静态部分和一个来自通过 Rp 的输出的反馈分量。这两个都是可调的,可以调节最大电压(最大脉冲宽度)和最小电压(最小脉冲宽度)对应的脉冲宽度。
所以我们有一个带有保持功能的脉宽电压转换器。
电路的底部是超时功能。每个正向输入脉冲同时触发定时周期并将定时电容器钳位到零。因此,定时器输出在脉冲序列开始时变高,但仅在最后一个输入脉冲结束时才开始其计时周期。如果在超时之前没有更多的脉冲到达,定时器将完成其时间周期并通过 Tr19 将输出电压重置为零,并且高尔夫球车停止。
如果这个逻辑有点晦涩,我的想法是拥有一个带有四个按钮和一个速度电位器的小型手持式发射器。一个按钮是“停止”——上面没有包括这个的电路,但它会打开 Tr19,停止机器死机。另一个按钮是“刷新”。这将发送一串脉冲(宽度由速度电位器决定)来设置速度。这个想法是用户每 30 秒左右推动一次,以发送球童,或保持其进度。如果操作员没有及时刷新系统,定时器就会超时。
转向电路
转向电路中的电平转换器和脉冲长度比较器与速度电路中的相同,但输出分别馈送到两个脉冲序列检测器。这些其实和速度控制中的timeout是一样的。当存在脉冲时,计时器的输出为高电平,激活相应的继电器以向左或向右转动转向电机。
转向电路与速度控制电路非常相似,实际上没什么好说的!
概括
每个设计师有时都希望他以不同的方式开始项目:这也不例外!该电路实际上工作正常 - 但在原型上,继电器和电机会对接收器产生干扰,从而产生短输出脉冲。正如您想象的那样,这些搞砸了操作!所以我将不得不放入某种最小脉冲长度滤波器……

相关文章
发表评论