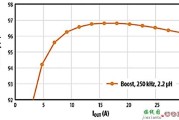
设计汽车转换器时,尺寸、成本和可靠性是关键因素。为了满足这些标准,最简单的双向拓扑;选择同步降压/反向升压转换器。最大限度地提高能源效率也至关重要,在...
BLDC 电机控制设计
接线图
2024年01月28日 08:54 341
admin
直流电机广泛应用于伺服自动化和机器人领域。电动机的工作原理基于两个相互吸引和排斥的磁场的相互作用。
直流电机的两个基本部分是转子(旋转)和定子(固定)。定子是磁场感应器,而转子是受到磁场影响的元件,由称为电枢的电路表示。在这两个元件之间有一层薄薄的空气,称为“气隙”。
定子必须产生尽可能均匀的磁场。转子由片状铁制成,由可移动的片片组成,这些片片由绝缘体隔开,以增加电阻,从而减少磁化引起的寄生电流。
两种最常见的直流电机类型称为有刷电机和无刷电机 (BLDC)。BLDC 表示无刷永磁电机。与有刷直流电机不同,它不需要在电机轴上滑动的任何电触点即可运行。
在有刷电机中,电刷与转子上的电触点的机械接触闭合电源和转子绕组之间的电路。转子和电刷产生不断改变方向的电流,从而反转磁场。
在无刷电机中,电流反转是通过微控制器控制的一组功率晶体管(通常是 IGBT)以电子方式获得的。驱动它们的主要问题是了解电机的准确位置;只有这样控制器才能确定驱动哪一相。转子的位置通常使用霍尔效应传感器或光学传感器获得。在效率方面,由于摩擦减少,无刷电机比同等交流电机产生的热量少得多。
此外,无刷电机定子上的绕组具有良好的散热能力,可以构建没有散热片的“平滑”电机。当电机在充满挥发性化合物(例如燃料)的环境中运行时,没有火花至关重要。在这种类型的电机中,磁铁位于转子上,并由特殊材料制成,具有非常低的惯性。这确保了极高的速度和扭矩精度,以及快速而精确的加速和减速。
与传统电机相比,BLDC 电机具有许多优势。通常,它们的效率提高了 15% 到 20%,由于它们是无刷的,因此需要较少的维护,并且在所有额定速度下都提供平坦的扭矩曲线。
半导体技术的最新发展、永磁体的改进以及对更高效率不断增长的需求导致许多应用中用 BLDC 取代有刷电机。BLDC 电机已进入许多行业,包括家电、汽车、航空航天、消费品、医疗、工业自动化设备和仪器仪表(图 1 )。
 图 1:无刷直流电机控制和驱动器的示例应用(图片:Infineon Technologies)
图 1:无刷直流电机控制和驱动器的示例应用(图片:Infineon Technologies)
BLDC 电机可以有单相、两相和三相配置;最常见的是三相。相数对应于定子上的绕组数,而转子极可以是任意对数,具体取决于应用(图 2)。
转子速度与电机的脉冲宽度调制(PWM)工作频率成正比,这是控制启动电流、扭矩和功率的基本工作频率。 BLDC 电机控制设计
直流电机的等效电路
直流电机及其控制的研究涉及对等效模型的精确分析,以确定最佳运行特性。从研究直流电机的数学模型开始,可以选择最佳的驱动器来控制负载。
以下方程表示简化假设下转子的数学模型。假设磁路是线性的,机械摩擦是电机速度的线性函数(图 3)。 BLDC 电机控制设计
类似地,假设转子仅具有一个极性终端,其特征在于电枢电阻R a(几欧姆)和电枢电感L a。此外,在转子的电气模型中必须考虑反电动势 e(t) 的影响,该反电动势 e(t) 对应于定子感应的电压差并与旋转速度成比例。图 1中相关电路的方程如下:
BLDC 电机控制设计
其中 v a (t) 和 i a (t) 分别为电枢电流和电压。
类似地,我们将定义转子增益 (Ka) 和转子时间常数 (τa)。可以将反电动势 (e) 和电机传递的机械扭矩 cm 定义为 :
BLDC 电机控制设计
Ke 和 Kc 是电机的两个常数,称为椭圆常数和扭矩常数,ω 是角速度。
机械负载的行为几乎总是非线性的。负载的线性模型可以通过将电机扭矩 cm 等于三个参数之和来获得:施加在电机轴上的负载扭矩,根据摩擦系数 F 与电机旋转速度成比例的参数,以及与电机转速对转动惯量J的导数成正比的参数;那是:
BLDC 电机控制设计
执行拉普拉斯变换,我们可以定义两项:K m,机械增益,和 e m,机械时间常数,得出以下等式:
BLDC 电机控制设计
它表达了位置与电枢电流之间的直接关系。
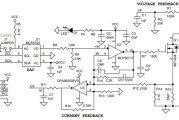
直流电机驱动器
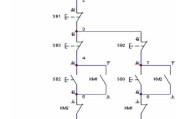
驱动器是 BLDC 控制的基本元件。它是一个功率放大器,产生电压输出来驱动 H 桥电路的高电流高侧和低侧 IGBT 栅极。高侧意味着源极(在 MOSFET 的情况下)或发射极(在 IGBT 盒中)可以在接地电压和较高电机电压之间波动。低侧表示源极或发射极始终接地。
ROHM Semiconductor 的BM60212FV-CE2集成栅极驱动器等解决方案非常适合驱动一对高侧和低侧 IGBT。该器件与 3.3V 或 5V 控制器逻辑信号兼容,并同时提供高达 1,200V 的可变高侧电源电压和 24V 的最大栅极控制电压。进一步的增强功能包括保护电路,主要是欠压阻断 (UVLO) 和去饱和保护 (DESAT)。UVLO 电路可防止加电期间过热和损坏.
另一个例子是英飞凌的 TLE987x 系列,它适用于广泛的 BLDC 应用。它提供了无与伦比的集成度和系统成本来优化目标应用领域。TLE9873QXW40器件集成了行业标准的 Arm Cortex-M3 内核,可实现先进的发动机控制算法。其外设包括一个电流传感器、一个与用于 PWM 控制的采集和比较单元同步的后续近似 ADC,以及 16 位定时器。
STMicroElectronics 用于三相 BLDC 的 STSPIN 电机驱动器包括采用三相桥配置的功率驱动器以及具有用于霍尔效应传感器的集成解码逻辑的解决方案。
东芝开发了智能相位控制(InPAC)技术,可监控电流相位(电流信息)和电压相位(霍尔效应信号),并向电机电流控制信号提供反馈,以自动调整最佳相位控制,以确保高效率。实际上,霍尔信号的相位会自动调整以匹配电机驱动电流的相位。高效率与电机的速度、负载扭矩和电源电压无关。
BLDC 电机的散热至关重要,其热管理必须确保高效率。损耗可以根据器件的电阻和寄生电容进行分类。
开关期间,晶体管的功耗与电源电压、栅极电荷 (QG) 和开关频率成正比。在给定的电源电压下,如果不想影响效率,则必须通过降低 QG 来抵消为提高功率密度而增加的开关频率。
Allegro MicroSystems A89331 无传感器驱动器旨在提高热效率、降低功耗并降低数据中心成本。新的断电制动 (PLB) 功能还提高了安全性并减少了材料需求。A89331 内置的独特 PLB 功能可对无法正常工作的风扇进行制动,从而消除额外的功耗并提高热效率。
如果没有电子硬件控制,发动机的机械结构就无法完成其工作。能源效率、扭矩和传感是选择驱动器以及应用类型时要牢记的主要特征。电机的内部运行加上数学模型使我们能够轻松评估运行特性,然后评估驱动器的选择。
直流电机的两个基本部分是转子(旋转)和定子(固定)。定子是磁场感应器,而转子是受到磁场影响的元件,由称为电枢的电路表示。在这两个元件之间有一层薄薄的空气,称为“气隙”。
定子必须产生尽可能均匀的磁场。转子由片状铁制成,由可移动的片片组成,这些片片由绝缘体隔开,以增加电阻,从而减少磁化引起的寄生电流。
两种最常见的直流电机类型称为有刷电机和无刷电机 (BLDC)。BLDC 表示无刷永磁电机。与有刷直流电机不同,它不需要在电机轴上滑动的任何电触点即可运行。
在有刷电机中,电刷与转子上的电触点的机械接触闭合电源和转子绕组之间的电路。转子和电刷产生不断改变方向的电流,从而反转磁场。
在无刷电机中,电流反转是通过微控制器控制的一组功率晶体管(通常是 IGBT)以电子方式获得的。驱动它们的主要问题是了解电机的准确位置;只有这样控制器才能确定驱动哪一相。转子的位置通常使用霍尔效应传感器或光学传感器获得。在效率方面,由于摩擦减少,无刷电机比同等交流电机产生的热量少得多。
此外,无刷电机定子上的绕组具有良好的散热能力,可以构建没有散热片的“平滑”电机。当电机在充满挥发性化合物(例如燃料)的环境中运行时,没有火花至关重要。在这种类型的电机中,磁铁位于转子上,并由特殊材料制成,具有非常低的惯性。这确保了极高的速度和扭矩精度,以及快速而精确的加速和减速。
与传统电机相比,BLDC 电机具有许多优势。通常,它们的效率提高了 15% 到 20%,由于它们是无刷的,因此需要较少的维护,并且在所有额定速度下都提供平坦的扭矩曲线。
半导体技术的最新发展、永磁体的改进以及对更高效率不断增长的需求导致许多应用中用 BLDC 取代有刷电机。BLDC 电机已进入许多行业,包括家电、汽车、航空航天、消费品、医疗、工业自动化设备和仪器仪表(图 1 )。
图 1:无刷直流电机控制和驱动器的示例应用(图片:Infineon Technologies)BLDC 电机可以有单相、两相和三相配置;最常见的是三相。相数对应于定子上的绕组数,而转子极可以是任意对数,具体取决于应用(图 2)。
转子速度与电机的脉冲宽度调制(PWM)工作频率成正比,这是控制启动电流、扭矩和功率的基本工作频率。 BLDC 电机控制设计

直流电机的等效电路
直流电机及其控制的研究涉及对等效模型的精确分析,以确定最佳运行特性。从研究直流电机的数学模型开始,可以选择最佳的驱动器来控制负载。
以下方程表示简化假设下转子的数学模型。假设磁路是线性的,机械摩擦是电机速度的线性函数(图 3)。 BLDC 电机控制设计

类似地,假设转子仅具有一个极性终端,其特征在于电枢电阻R a(几欧姆)和电枢电感L a。此外,在转子的电气模型中必须考虑反电动势 e(t) 的影响,该反电动势 e(t) 对应于定子感应的电压差并与旋转速度成比例。图 1中相关电路的方程如下:
BLDC 电机控制设计
其中 v a (t) 和 i a (t) 分别为电枢电流和电压。
类似地,我们将定义转子增益 (Ka) 和转子时间常数 (τa)。可以将反电动势 (e) 和电机传递的机械扭矩 cm 定义为 :
BLDC 电机控制设计
Ke 和 Kc 是电机的两个常数,称为椭圆常数和扭矩常数,ω 是角速度。
机械负载的行为几乎总是非线性的。负载的线性模型可以通过将电机扭矩 cm 等于三个参数之和来获得:施加在电机轴上的负载扭矩,根据摩擦系数 F 与电机旋转速度成比例的参数,以及与电机转速对转动惯量J的导数成正比的参数;那是:
BLDC 电机控制设计
执行拉普拉斯变换,我们可以定义两项:K m,机械增益,和 e m,机械时间常数,得出以下等式:
BLDC 电机控制设计
它表达了位置与电枢电流之间的直接关系。
直流电机驱动器
驱动器是 BLDC 控制的基本元件。它是一个功率放大器,产生电压输出来驱动 H 桥电路的高电流高侧和低侧 IGBT 栅极。高侧意味着源极(在 MOSFET 的情况下)或发射极(在 IGBT 盒中)可以在接地电压和较高电机电压之间波动。低侧表示源极或发射极始终接地。
ROHM Semiconductor 的BM60212FV-CE2集成栅极驱动器等解决方案非常适合驱动一对高侧和低侧 IGBT。该器件与 3.3V 或 5V 控制器逻辑信号兼容,并同时提供高达 1,200V 的可变高侧电源电压和 24V 的最大栅极控制电压。进一步的增强功能包括保护电路,主要是欠压阻断 (UVLO) 和去饱和保护 (DESAT)。UVLO 电路可防止加电期间过热和损坏.
另一个例子是英飞凌的 TLE987x 系列,它适用于广泛的 BLDC 应用。它提供了无与伦比的集成度和系统成本来优化目标应用领域。TLE9873QXW40器件集成了行业标准的 Arm Cortex-M3 内核,可实现先进的发动机控制算法。其外设包括一个电流传感器、一个与用于 PWM 控制的采集和比较单元同步的后续近似 ADC,以及 16 位定时器。
STMicroElectronics 用于三相 BLDC 的 STSPIN 电机驱动器包括采用三相桥配置的功率驱动器以及具有用于霍尔效应传感器的集成解码逻辑的解决方案。
东芝开发了智能相位控制(InPAC)技术,可监控电流相位(电流信息)和电压相位(霍尔效应信号),并向电机电流控制信号提供反馈,以自动调整最佳相位控制,以确保高效率。实际上,霍尔信号的相位会自动调整以匹配电机驱动电流的相位。高效率与电机的速度、负载扭矩和电源电压无关。
BLDC 电机的散热至关重要,其热管理必须确保高效率。损耗可以根据器件的电阻和寄生电容进行分类。
开关期间,晶体管的功耗与电源电压、栅极电荷 (QG) 和开关频率成正比。在给定的电源电压下,如果不想影响效率,则必须通过降低 QG 来抵消为提高功率密度而增加的开关频率。
Allegro MicroSystems A89331 无传感器驱动器旨在提高热效率、降低功耗并降低数据中心成本。新的断电制动 (PLB) 功能还提高了安全性并减少了材料需求。A89331 内置的独特 PLB 功能可对无法正常工作的风扇进行制动,从而消除额外的功耗并提高热效率。
如果没有电子硬件控制,发动机的机械结构就无法完成其工作。能源效率、扭矩和传感是选择驱动器以及应用类型时要牢记的主要特征。电机的内部运行加上数学模型使我们能够轻松评估运行特性,然后评估驱动器的选择。
相关文章
发表评论