交流发电机电压源是一台发电机,它从不同形式的能量产生电动势。最常见的电压源是交流发电机和电池。交流发电机通过机械旋转转换能量以产生交流信号,由于电...
雷达脉冲ToF电路设计(七)
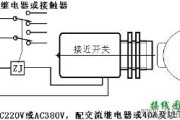
接线图
2024年02月06日 17:41 192
admin
、准确度和可重复性
和所有测量系统一样,它的性能特点也体现在、准确度和可重复性上。
分辨率
LIDAR 系统的是指两个已报告距离之间的最小差异。对于基于 TDC 的系统,由 TDC 的 LSB 决定。
信号链产生的时序延迟会影响准确度。这些时序问题的主要是由不同器件的传播延迟造成的。这些传播延迟因以下参数而异:从器件到器件、过热、电源电压过高,以及输入驱动过大。
漂移误差
测量脉冲 ToF 时会出现特定的准确度误差,这在文献中被称为“漂移误差”。漂移误差是结合使用以下因数时会出现的、固有的不性
光脉冲在从最开始发出能量到达到能量峰值之间具有一个有限斜率。
各种材料会以介于 0% 和 100% 之间的速率反射光。
脉冲 ToF 测量使用阈值来检测信号是否已到达。
接收到的能量因目标对象而异,但不受距离的影响,因此,阈值会在不同的时间发生交叉,从而导致估算的ToF 有误。
在图 9给出了有关这的图例说明。比较器输入设置为阈值电压,即 VTH。较强信号的削波速度非常快,在 t1处突破阈值;另一个勉强触及削波信号的信号将在 t2 时间处突破阈值 (t2 > t1);极弱的信号将在 t3 时间处突破阈值 (t3 > t2 > t1)。这些回声同时达到峰值,因此来自位于相同距离处的目标,即光的传输距离相同,这种情况下的漂移误差为系统性误差。
接收到的振幅对于估算的 ToF 以及相关“漂移误差”大小的影响可重复性
 第1张")
可重复性是指系统在测量相同数量的噪声时提供相同结果的能力(即,噪声在报告的最终值中所占的相对权重)。脉冲 ToF 系统中的噪声来源包括:
周期到周期抖动
长期抖动
相位抖动
时间间隔误差和时间间隔误差
人们通常认为,放大的阶段决定了噪声。大多数 TDC 架构依赖于对“缓慢”进行计数的外部时钟,因此这里将继续使用外部时钟。
根据 JEDEC 标准 65B JESD65V 和行业实践定义的时钟噪声如下所示:
TDC 组件本身的背景噪声
比较器输出的抖动,该抖动本身是输入信号除以输入信号斜率的噪声函数要确定最确切的噪声定义,务必谨记,此 LIDAR 系统的设计目标是实现 100m 的传感距离,即总 ToF 为333ns。时钟频率介于 1 和 10MHz 之间,这意味着周期介于 1 s 和 100ns 之间。因此,时钟产生的噪声将持续一到三个周期。
相关文章

发表评论