
双联开关接线图双联开关接线图双联开关接线图【实战问题】 家用卫生间有个开关,是2个按纽的,一个控制镜前灯,另一个控制吸顶灯,开关呢,是松日的,有 6个...
低成本双向有刷直流电机控制
接线图
2024年02月06日 17:44 405
admin
它解释了如何在 PIC16F684 上使用增强型、捕捉、比较和 PWM (ECCP)。低成本BDC电机控制可用于智能玩具、小家电和电动工具等应用。PIC16F684 凭借其新的 ECCP 外设将 Microchip 的中档产品系列提升到了一个新的水平。ECCP 外设以 CCP 模块技术为基础,并添加了四个 PWM 通道等功能,可通过硬件轻松实现双向电机控制。本应用笔记重点介绍在 PWM 模式下使用 ECCP 的全桥配置。ECCP 可以轻松连接到全桥配置,以实现双向 BDC 电机控制。
本应用笔记描述了以下内容:
计算 ECCP PWM 参数
在全桥 PWM 模式下初始化 ECCP
双向 BDC 电机控制
无传感器电机控制反馈
应用示例
计算 ECCP PWM 参数
在 PWM 模式下使用 ECCP 时,需要计算 PWM 频率、占空比和分辨率。
频率
为电机控制应用选择 PWM 频率会影响电机的声音和功率晶体管的开关速度。人耳可以检测到 20 Hz 至 20 kHz 的频率。在本应用笔记中,用于电机控制的 PWM 工作频率为 4 kHz。这比 1kHz 等更低的 PWM 频率产生的噪声更低。如果应用带宽可以支持更高的频率(特别是高于人类典型听力范围的频率),电机将产生更少的可听噪声。如果听到太多可闻噪声,则应增加 PWM 频率。
PWM 周期和频率可使用公式 A-1 和 A-2 计算。
占空比
改变 PWM 占空比将改变电机的平均电压,从而改变电机的速度。PWM 占空比使用公式 A-3 计算。BDC 电机的平均电压使用公式 A-4 计算。
解决
PWM 占空比分辨率决定了可以更改占空比的精度。例如,10 位分辨率允许占空比有 1024 个可能的值,而 8 位分辨率仅允许 256 个值。PWM 频率、PIC16F684 振荡器频率和 Timer2 预分频器都会影响分辨率值。最大分辨率为十位。PWM 占空比分辨率使用公式 A-5 计算。
在全桥 PWM 模式下初始化 ECCP
全桥 PWM 模式下初始化 ECCP 时,需要初始化 4 个寄存器:
PR2
PR2 寄存器影响 PWM 频率/周期。PR2 寄存器使用的值使用公式 A-6 计算。
CCPR1L:CCP1CON<5:4>
PWM 占空比具有十位的完整分辨率。由于 PIC16F684 上的所有寄存器都是 8 位宽,因此这 10 位分布在两个寄存器中。CCPR1L 包含高八位,CCP1CON<5:4> 包含低两位。CCPR1L:CCP1CON<5:4> 的 10 位值使用公式 A-7 计算。
CCP1CON
除了存储 10 位 PWM 占空比的低两位外,CCP1CON 还用于通过位 CCP1CON<3:0> 将 ECCP 设置为 PWM 模式。它还可以使用位 CCP1CON<7:6> 更改电机方向。在 PWM 模式下设置 ECCP 时,有四种可能的配置。这些配置可容纳具有高电平有效、低电平有效或高电平有效和低电平有效组合的 MOSFET 的 H 桥。通过将 CCP1CON<7:6> 位配置为“01”(表示正转)或“11”(表示反转),可以在硬件中更改电机方向。PIC16F684 ECCP 硬件切换通道以激活和调制 H 桥中适当的 MOSFET 驱动器。
T2CON
T2CON 寄存器用于设置 Timer2 预分频器和打开 Timer2。Timer2 预分频器包含在位 T2CON<1:0> 中,用于确定 PWM 频率、占空比和分辨率。在 PWM 信号启动之前,必须通过将 T2CON<2> 位置 1 来打开 Timer2。图 B-1 显示了计算 PWM 频率的 Timer2 预分频器和 PR2 值的算法。
双向 BDC 电机控制
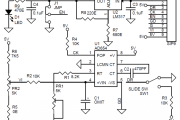
ECCP 通过将 CCP1CON<7:6> 配置为“01”表示正向(图 1)或“11”表示反向(图 2),可以轻松更改电机方向。
 图 1 全桥正向电流流程图
图 1 全桥正向电流流程图
 图 2 全桥反向电流流程图
图 2 全桥反向电流流程图
低成本无传感器电机控制反馈
无传感器转速测量
通过测量电机的反电动势电压,可以使用 BDC 电机执行低成本 RPM 测量。BDC RPM 与反电动势电压成正比。由于 BDC 电机可以建模为感性负载,因此电机两端的电压等于电感乘以 dI/dt。在此应用中,使用了 12V、最大转速 9600 RPM BDC 电机。要测量反电动势电压,请关闭调制 FET。这将导致电流沿相反方向流动。最初关闭 FET 后,dI/dt 必须稳定后再进行测量。为了使用 PIC? 单片机 A/D 转换器,测量的电压必须在 0V 和 VDD 之间。由于反电动势电压可以在 0V-12V 之间,因此使用分压器电路将反电动势电压调整在 0V 和 VDD 之间。
本应用笔记描述了以下内容:
计算 ECCP PWM 参数
在全桥 PWM 模式下初始化 ECCP
双向 BDC 电机控制
无传感器电机控制反馈
应用示例
计算 ECCP PWM 参数
在 PWM 模式下使用 ECCP 时,需要计算 PWM 频率、占空比和分辨率。
频率
为电机控制应用选择 PWM 频率会影响电机的声音和功率晶体管的开关速度。人耳可以检测到 20 Hz 至 20 kHz 的频率。在本应用笔记中,用于电机控制的 PWM 工作频率为 4 kHz。这比 1kHz 等更低的 PWM 频率产生的噪声更低。如果应用带宽可以支持更高的频率(特别是高于人类典型听力范围的频率),电机将产生更少的可听噪声。如果听到太多可闻噪声,则应增加 PWM 频率。
PWM 周期和频率可使用公式 A-1 和 A-2 计算。
占空比
改变 PWM 占空比将改变电机的平均电压,从而改变电机的速度。PWM 占空比使用公式 A-3 计算。BDC 电机的平均电压使用公式 A-4 计算。
解决
PWM 占空比分辨率决定了可以更改占空比的精度。例如,10 位分辨率允许占空比有 1024 个可能的值,而 8 位分辨率仅允许 256 个值。PWM 频率、PIC16F684 振荡器频率和 Timer2 预分频器都会影响分辨率值。最大分辨率为十位。PWM 占空比分辨率使用公式 A-5 计算。
在全桥 PWM 模式下初始化 ECCP
全桥 PWM 模式下初始化 ECCP 时,需要初始化 4 个寄存器:
PR2
PR2 寄存器影响 PWM 频率/周期。PR2 寄存器使用的值使用公式 A-6 计算。
CCPR1L:CCP1CON<5:4>
PWM 占空比具有十位的完整分辨率。由于 PIC16F684 上的所有寄存器都是 8 位宽,因此这 10 位分布在两个寄存器中。CCPR1L 包含高八位,CCP1CON<5:4> 包含低两位。CCPR1L:CCP1CON<5:4> 的 10 位值使用公式 A-7 计算。
CCP1CON
除了存储 10 位 PWM 占空比的低两位外,CCP1CON 还用于通过位 CCP1CON<3:0> 将 ECCP 设置为 PWM 模式。它还可以使用位 CCP1CON<7:6> 更改电机方向。在 PWM 模式下设置 ECCP 时,有四种可能的配置。这些配置可容纳具有高电平有效、低电平有效或高电平有效和低电平有效组合的 MOSFET 的 H 桥。通过将 CCP1CON<7:6> 位配置为“01”(表示正转)或“11”(表示反转),可以在硬件中更改电机方向。PIC16F684 ECCP 硬件切换通道以激活和调制 H 桥中适当的 MOSFET 驱动器。
T2CON
T2CON 寄存器用于设置 Timer2 预分频器和打开 Timer2。Timer2 预分频器包含在位 T2CON<1:0> 中,用于确定 PWM 频率、占空比和分辨率。在 PWM 信号启动之前,必须通过将 T2CON<2> 位置 1 来打开 Timer2。图 B-1 显示了计算 PWM 频率的 Timer2 预分频器和 PR2 值的算法。
双向 BDC 电机控制
ECCP 通过将 CCP1CON<7:6> 配置为“01”表示正向(图 1)或“11”表示反向(图 2),可以轻松更改电机方向。
图 1 全桥正向电流流程图 图 2 全桥反向电流流程图低成本无传感器电机控制反馈
无传感器转速测量
通过测量电机的反电动势电压,可以使用 BDC 电机执行低成本 RPM 测量。BDC RPM 与反电动势电压成正比。由于 BDC 电机可以建模为感性负载,因此电机两端的电压等于电感乘以 dI/dt。在此应用中,使用了 12V、最大转速 9600 RPM BDC 电机。要测量反电动势电压,请关闭调制 FET。这将导致电流沿相反方向流动。最初关闭 FET 后,dI/dt 必须稳定后再进行测量。为了使用 PIC? 单片机 A/D 转换器,测量的电压必须在 0V 和 VDD 之间。由于反电动势电压可以在 0V-12V 之间,因此使用分压器电路将反电动势电压调整在 0V 和 VDD 之间。
相关文章
发表评论