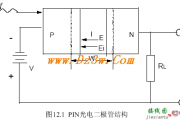
PIN光电二极管是在PN结的P型层和N型层之间夹了一层本征半导体(semiconductor ,形成P-I-N结构而得名,如下图所示:如上图所示,处于...
雷达脉冲ToF电路设计(四)
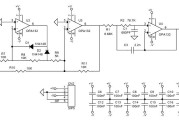
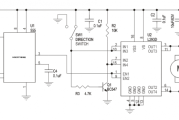
接线图
2024年02月06日 17:44 235
admin
概括来说,该系统测量传感器及其前面个障碍物之间的距离。测量距离的方法是,计算发出光脉冲和接收回波之间的时间。时间测量是通过 TDC 完成的,我们可将 TDC 视为集成到器件中的秒表。TDC 具有50ps 的计时分辨率。
以下几篇文章会讲LIDAR 系统选项。
用于 ToF 估算的相移法
相移法的原理是,调制发射光的振幅,然后测量发射光和接收光之间的相位差。考虑到光速 (c) 和调制频率(f),当距离 (d) 为 d = c × f/2 的倍数时将发生混叠。为了降低此效应的影响,可使用多个频率来扩大传感范围。相移测量可以通过直接采样、外差(因为信号相位在中频时不会更改)或者 I/Q 解调欠取样完成。
脉冲 ToF 估算
脉冲 ToF 估算可以直接测量发出和接收到激光之间的 ToF。
光学设计
概括来讲,光学设计需要满足以下要求:
应尽可能扩大发送路径和接收路径共有的视场。
光学器件需要限度地增加目标在将光反射回传感器前接收的能源。
光学器件需要限度地增加光电二极管接收到的能源。
光学器件可过滤环境光以降低系统中的背景噪声。
激光二极管、LED、光电二极管以及关于距离的注意事项在设计 LIDAR 系统时遇到的一个最基本的问题是,需要估算传感元件接收到的、作为传输能量函数的能源量。
与雷达方程式类似,以下公式是 LIDAR 方程式:
 第1张")
其中:
Gt 表示传输元件的效率
Gr 表示接收元件的效率
R 是光学接收元件的半径(π ×r2 等于面积)2 × π 是目标衍射光的立体角
D 是目标元件和传感元件之间的距离
要使公式 生效,需假设传输光可以完全射中目标。安装在激光二极管或 LED 前端的透镜能够做到这一点。
但请记住,大多数工业(或汽车)设计所用的激光二极管均为半导体二极管,因为它们的机械结构会致使光在离开半导体基板时发生衍射。
 第2张")
大多数二极管会垂直堆叠起来,这样一来,水平缝隙创建的衍射光束会产生比水平角更宽的垂直角。据最初粗略估计,垂直轴上的角度介于 30 到 40 度之间,而平行轴上的角度为 10 度。必须将透镜设计为能够纠正这种散光问题;否则,垂直轴上的焦点将无法与平行轴上的焦点相重叠。参见下图。
 第3张")
对于使用 LED 而非激光二极管的系统,需校正公式 1 以将光广泛扩散的因素包括在内。激光器接收到的能量是 1/d4 而非 1/d2 的函数。
相关文章
发表评论