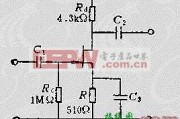
场效应晶体管放大器是电压控制器件,具有输入阻抗高、噪声低的优点,被广泛应用在电子电路中,特别是具有上述要求前级放大器显示器出越性。根据场效应管两大类型...
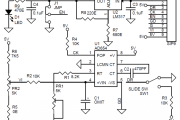
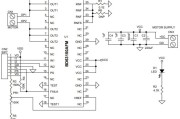
测速发电机电机速度反馈电路
接线图
2024年02月06日 17:48 331
admin
大多数电池电机速度控制器都是手动控制的,操作员会自动调整速度以满足需求。在这些条件下,闭环电机速度控制是不必要的开支。然而,当需要时,可以很容易地添加测速发电机。
真正的测速发电机通常很昂贵——这让大多数潜在用户望而却步。费用是因为它们的制造和校准非常精确。它们也是小批量商品。然而,对于大多数用途,小型永磁电机就足够了。它不会带有准确的“每转电压伏特”校准,并且可能(只是可能)漂移数年。对于大多数目的,这根本无关紧要!
对于任何测速反馈系统,环路增益(控制器、电机、测速、测速放大器)不得超过统一或不稳定结果。
更简单地说:反馈系统必须改变电机的输出电压,使电机电压升高以精确匹配电流流动引起的电机电枢压降,从而使机械速度保持恒定。
如果环路过度补偿,那么电机在加载时会转得太快并且会“搜索” - 速度会不稳定并且会反弹。如果补偿太少 - 性能将达不到最佳状态。
但是 - 有很多变量,包括电池电压和电机温度。一个理想的系统会测量一切并对其进行补偿(而且非常昂贵!)。在实践中,调整非常简单:您只需将一个电位器与用作测速发电机的电机串联起来,然后对其进行调整,直到电机开始摆动(显示速度变化),然后稍微后退一点,直到它稍微低于最佳值。
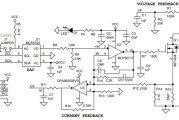
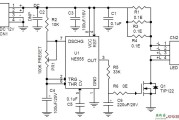
测速发电机整流器:电路
除了作为我们的 TFB,其中一部分(四路运算放大器的 3 个 LH 部分)实际上是我们在 4QD 系列控制器中使用的电路,用于提供电枢电压反馈。它是一个带有误差放大器的精密整流电路,它可以检测电枢电压或测速发电机的电压以提供闭环控制。
输出级是一个积分器,用于去除误差信号的直流分量。
该电路使用四路运算放大器 LM324。前两级是直接差分放大器,用于比较测速发电机的两条电线。一个适用于正电压,另一个适用于负电压。
现在该电路使用单电源供电。因此运算放大器输出不能摆动负。因此,一个放大器为测速发电机的一个方向提供正输出,而另一个为反向提供正输出。运算放大器的第三部分对输出求和,结果是输入的整流版本。
因此,使用运算放大器存在障碍。在应该摆动负输出的输入上,运算放大器实际上是截止的,输出不导通。输入超出了它们的工作范围,因此它们无法钳制控制信号。然后有一个直接的前馈路径通过“反馈”电阻器到不工作的输出。
该机制解释了运算放大器前两级输出到地的 10K 负载电阻。这些与前馈路径中的 3 个 100K 电阻一起构成了一个衰减器,从而将前馈误差降低到 3% 左右。浏览器可能会感兴趣,因为该电路最初是与 LM3900(诺顿运算放大器)一起使用的,其中输入永远不会超过 0v 以上的晶体管 Vbe。这样,前馈效应不明显,也不需要钳位电阻。您会注意到的 LM3900 电路没有显示输出积分器。
第四阶段将整流后的测速发电机电压与需求速度进行比较,对差值进行积分并给出输出以驱动 PWM 调制器。
我不打算进入数学,但是,如果你不把事情弄对,测速反馈电路可能会出现可怕的错误。电机是机械的东西,需要时间来做出反应。如果控制信号的反应速度比电机快,那么它将反应过度并导致振荡环路。
此外,电机速度控制的精度取决于(如您所料)反馈回路内的增益。但如果增益太大,则会产生反馈振荡器。
真正的测速发电机通常很昂贵——这让大多数潜在用户望而却步。费用是因为它们的制造和校准非常精确。它们也是小批量商品。然而,对于大多数用途,小型永磁电机就足够了。它不会带有准确的“每转电压伏特”校准,并且可能(只是可能)漂移数年。对于大多数目的,这根本无关紧要!
对于任何测速反馈系统,环路增益(控制器、电机、测速、测速放大器)不得超过统一或不稳定结果。
更简单地说:反馈系统必须改变电机的输出电压,使电机电压升高以精确匹配电流流动引起的电机电枢压降,从而使机械速度保持恒定。
如果环路过度补偿,那么电机在加载时会转得太快并且会“搜索” - 速度会不稳定并且会反弹。如果补偿太少 - 性能将达不到最佳状态。
但是 - 有很多变量,包括电池电压和电机温度。一个理想的系统会测量一切并对其进行补偿(而且非常昂贵!)。在实践中,调整非常简单:您只需将一个电位器与用作测速发电机的电机串联起来,然后对其进行调整,直到电机开始摆动(显示速度变化),然后稍微后退一点,直到它稍微低于最佳值。
测速发电机整流器:电路
除了作为我们的 TFB,其中一部分(四路运算放大器的 3 个 LH 部分)实际上是我们在 4QD 系列控制器中使用的电路,用于提供电枢电压反馈。它是一个带有误差放大器的精密整流电路,它可以检测电枢电压或测速发电机的电压以提供闭环控制。
输出级是一个积分器,用于去除误差信号的直流分量。

该电路使用四路运算放大器 LM324。前两级是直接差分放大器,用于比较测速发电机的两条电线。一个适用于正电压,另一个适用于负电压。
现在该电路使用单电源供电。因此运算放大器输出不能摆动负。因此,一个放大器为测速发电机的一个方向提供正输出,而另一个为反向提供正输出。运算放大器的第三部分对输出求和,结果是输入的整流版本。
因此,使用运算放大器存在障碍。在应该摆动负输出的输入上,运算放大器实际上是截止的,输出不导通。输入超出了它们的工作范围,因此它们无法钳制控制信号。然后有一个直接的前馈路径通过“反馈”电阻器到不工作的输出。
该机制解释了运算放大器前两级输出到地的 10K 负载电阻。这些与前馈路径中的 3 个 100K 电阻一起构成了一个衰减器,从而将前馈误差降低到 3% 左右。浏览器可能会感兴趣,因为该电路最初是与 LM3900(诺顿运算放大器)一起使用的,其中输入永远不会超过 0v 以上的晶体管 Vbe。这样,前馈效应不明显,也不需要钳位电阻。您会注意到的 LM3900 电路没有显示输出积分器。
第四阶段将整流后的测速发电机电压与需求速度进行比较,对差值进行积分并给出输出以驱动 PWM 调制器。
我不打算进入数学,但是,如果你不把事情弄对,测速反馈电路可能会出现可怕的错误。电机是机械的东西,需要时间来做出反应。如果控制信号的反应速度比电机快,那么它将反应过度并导致振荡环路。
此外,电机速度控制的精度取决于(如您所料)反馈回路内的增益。但如果增益太大,则会产生反馈振荡器。
相关文章
发表评论