
双联开关接线图双联开关接线图双联开关接线图【实战问题】 家用卫生间有个开关,是2个按纽的,一个控制镜前灯,另一个控制吸顶灯,开关呢,是松日的,有 6个...
为您的应用选择合适的软件无线电解决方案
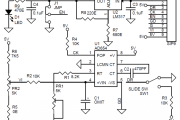
接线图
2024年02月20日 21:14 245
admin
在本文中,我们将探讨跨阻放大器 (TIA) 的各种输入耦合选项的影响,并阐明每种情况下容易被忽视的后果。目的是帮助工程师有效地设计和优化 LIDAR 系统的 TIA 接口。我们将重点介绍将高增益光学检测器耦合到 TIA 输入时的设计挑战。
LIDAR 输入不是一个微不足道的话题,在此过程中会有很多变化的部分。信号链将根据您选择的设计而有所不同,因此在选择最适合您的项目的选项之前考虑所有选项非常重要。
激光雷达和你
飞行时间 LIDAR 接收器信号链有许多设计权衡,可能会影响成像系统的性能。TIA 与其检测器之间的接口是这一挑战的一部分。对于具有多通道切换功能的跨阻放大器尤其如此。
激光雷达接收器构建块
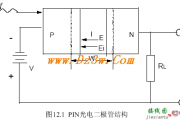
飞行时间激光雷达系统由发射信号链和接收信号链组成。发射部分向物体发送光子脉冲,接收部分测量该脉冲的幅度和性质。光从传输到检测所需的时间告诉您光传播了多远。在最基本的层面上,接收信号链由光电探测器、TIA 和模数转换器 (ADC) 组成,如图 1 所示。
LIDAR 输入不是一个微不足道的话题,在此过程中会有很多变化的部分。信号链将根据您选择的设计而有所不同,因此在选择最适合您的项目的选项之前考虑所有选项非常重要。
激光雷达和你
飞行时间 LIDAR 接收器信号链有许多设计权衡,可能会影响成像系统的性能。TIA 与其检测器之间的接口是这一挑战的一部分。对于具有多通道切换功能的跨阻放大器尤其如此。
激光雷达接收器构建块
飞行时间激光雷达系统由发射信号链和接收信号链组成。发射部分向物体发送光子脉冲,接收部分测量该脉冲的幅度和性质。光从传输到检测所需的时间告诉您光传播了多远。在最基本的层面上,接收信号链由光电探测器、TIA 和模数转换器 (ADC) 组成,如图 1 所示。

图 1. 由 ADC 量化的 LIDAR 接收器信号链。
对于多通道应用,多路复用器用于减少 ADC 的数量。当光子撞击光电探测器时,它会产生电流,该电流会被 TIA 转换为电压。然后该电压被 ADC 量化为数字值。量化器的另一种流行选择是使用比较器和时间数字转换器 (TDC),如图 2 所示。这些 TDC 系统的成本和功耗降低了一个数量级,同时牺牲了较低的系统性能。此外,多路复用器的使用通常不与 TDC 一起使用,但可以用于减少 TDC 和比较器的数量。

图 2. 由 TDC 量化的 LIDAR 接收器信号链。
存在三种主要类型的检测器。光电二极管是将光子转换为电子的探测器,但它们不提供光学增益,因此不是这些应用的普遍选择。激光雷达系统中流行的检测器是雪崩光电二极管 (APD)。APD 是反向偏置直至结点击穿的光电二极管,可获得光学增益。第三种类型的探测器是单光子雪崩二极管 (SPAD)。SPAD 是反向偏置的,具有介于击穿电压和与 SPAD 的保护环相关的第二个更高击穿电压之间的过量偏置电压。在这种偏压下,注入耗尽层的单个电荷载流子可以触发自持雪崩,从而在检测器上产生数千倍的虚拟增益。由于 SPAD 的敏感性,它们似乎是自然的选择。然而,激光雷达系统必须应对许多现实世界的后果,过多的增益会很容易使接收链饱和。此外,额外的增益伴随着额外的噪声,称为过度噪声因子 (ENF)。ENF 与偏差呈指数相关,过多的增益会给检测器带来更差的信噪比 (SNR)。幸运的是,APD 是一种令人满意的介质,可为该空间提供足够的光学增益,但 ENF 不会过多而对 SNR 产生负面影响。增益太大会给检测器带来更差的信噪比 (SNR)。幸运的是,APD 是一种令人满意的介质,可为该空间提供足够的光学增益,但 ENF 不会过多而对 SNR 产生负面影响。增益太大会给检测器带来更差的信噪比 (SNR)。幸运的是,APD 是一种令人满意的介质,可为该空间提供足够的光学增益,但 ENF 不会过多而对 SNR 产生负面影响。
当光子撞击 APD 时,会在结处产生电子空穴对。APD 的高电场就像弹弓一样,加速电子以击落更多电子。这增加了每个接收到的光子释放的电子数量。这种效应称为雪崩效应,它增加了一个倍增因子(M 因子)。由于 TIA 的本底噪声通常是 SNR 的限制因素,因此这种增益依赖于偏置,可以让我们看到较弱的信号。目标是匹配信号链中下一阶段的本底噪声。在这种情况下,通过在 APD 中提供足够的增益来匹配 TIA 的本底噪声,以略??微支配信号链噪声,从而为系统提供最佳 SNR。这种噪声匹配概念广泛用于传感器本底噪声不是限制因素的许多信号链中。实际上,接收器性能的提高转化为检测范围的扩大。APD 的另一个重要优势是快速饱和恢复。同样,TIA 是这方面的限制因素,LIDAR 特定的 TIA 旨在减少饱和时间以避免使 LIDAR 系统致盲。APD 的唯一缺点是它们相对较高的偏置点(数百伏)以及与之相关的温度系数。
激光雷达对 TIA 有独特的要求。低电流噪声和高带宽是所有光学应用的典型特征。然而,低功率是必要的。由于当前系统具有 64 个或更多 TIA APD 通道,系统的功率预算可能会很快受到压力。因此,在不使用 TIA 时需要低功耗模式。此外,这些设备需要快速唤醒以优化其功率预算。现代 LIDAR TIA 的另一个要求是针对饱和事件的钳位电路以及平衡和权衡输入参考噪声和带宽。普通光信号链和 LIDAR 之间的一个主要区别是环境。在光纤应用中,系统是封闭的并且非常稳定。然而,在激光雷达中,我们需要应对太阳以及其他激光雷达系统。太阳可能会导致直流输入使接收链线性范围饱和。这是工程师在设计这些系统时必须克服的首要挑战之一。不幸的是,解决方案并不容易,本文将予以解决。
输入交流耦合注意事项
让我们探索一种阻止直流信号的简单方法,许多工程师尝试实施但未取得太大成功的方法:在 APD 和 TIA 之间连接一个交流耦合电容器。通过放置一个电容器,我们可以减轻直流效应,但这会带来一系列新的挑战。
RC 权衡
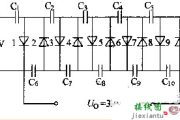
首先,将交流耦合电容器添加到 TIA 输入的输入端还需要将直流路径连接到检测器。通过放置一个电阻器 R B,可以设置 APD 的偏置点,从而允许您将 TIA 输入与 C IN进行交流耦合,如图 3 所示。您为此偏置路径做出的一个牺牲是它为APD 电流流过。该并行路径将对 APD 的增益产生负面影响,因为它的信号将被共享。此 APD 增益衰减的幅度由 TIA 输入阻抗与为 R B选择的值之间的比率决定。此外,CIN当输入受到来自 APD 的电流时,会对电路产生影响,在电容器上产生电压。这种效应是由于电容器的积分电流特性造成的,其中电压是电流随时间和电容值的函数。目标是使 C IN足够小以最小化充电效应,但又足够大以使其(具有足够低的阻抗)以感兴趣的频率传递信号。换句话说,如果 C IN太大,则放电需要更长的时间,但如果 C IN太小,您将失去一些信号作为电压降(如果脉冲具有较长的相对时间尺度,则失真)到电容)。这些影响中的任何一个都会严重损害信号链。
图 3.需要R B来交流耦合 TIA。
上浆 R B和 C IN
让我们举例说明 C IN 的尺寸太小会如何影响您的满量程测量:在 200 MHz 时,一个 33 pF 的电容器看起来像 24 Ω,这会产生一个带有 R IN的分压器(对于 LIDAR TIA,通常约为几百欧姆) ), 将信号的实际值减去 10%。10% 的信号命中率可以轻松抵消为优化光学设计等其他领域所做的艰苦工程工作。当确定 R B 的大小时,这种用于消除直流的交流耦合方法的缺陷变得很明显。RB _与 TIA 输入阻抗相比应该很大,以防止增益下降,但又足够小,不会影响饱和恢复。选择 RC 时间常数的不可能平衡由于检测器的输入信号是单极的这一事实而变得复杂。输入脉冲的方波特性在此 RC 上进行平均,将消除 TIA 的动态范围。此外,TIA 可能会在通道切换时或通过使用输出多路复用时为 C IN充电。例如,使用LTC6561,有源通道的 TIA 输入标称值为 1.5 V。当通道处于非活动状态时,输入电压降至 0.9 V。当在检测器和 TIA 输入之间插入交流耦合电容器时,电容器必须重新充电至 1.5 V,通道才能再次激活。图 4 说明了通道切换与输入耦合电容器的多通道系统性能下降。请注意,输出多路复用时间 (OMUX) 受到的影响类似于通道切换,因为它在内部以相同的方式禁用输入。再充电时间将由第一级 RT 电阻器复合,该电阻器通常在几十千欧姆的数量级,因为在这种情况下控制回路被破坏。在关断模式下关断输入级以节省功耗的 TIA 中也会产生类似的效果。
交流耦合输入导致的 OMUX 和通道切换时间图。R B = 12kΩ。
TIA 饱和注意事项
在这个坑里挖得更深,饱和度恢复将是棺材上的最后一颗钉子。图 5 显示了 C IN暴露于高输入电流时的输出。10 mA 脉冲对交流耦合 TIA 的影响,其中 R B为 2.2 kΩ,C IN为 100 pF,清楚地显示了高电流脉冲事件后两个不同的操作区域。在 5 ns 的 10 mA 输入脉冲之后,AC 电容器已被大量充电并且 TIA 输出轨的输出接地。这种接地输出饱和是输入被拉离其标称 1.5 V 的征兆,并且是检测器电流幅度和持续时间的函数。脉冲电流越高,输出饱和、接地的时间越长。第二个操作区域是恢复状态。该恢复状态时间常数与 R B和 C IN相关。
显示了不同条件下的两种机制,它们提供了更多直观的见解。总恢复时间是交流耦合输入 TIA 的轨道时间和恢复时间之和。为 R B使用较小的电阻值以减少恢复时间可能很诱人,但请记住,R B也是检测器的并联路径并窃取了一些输入电流——这种窃取的电流转化为整体的减少APD 的增益。不幸的是,由于预计 LIDAR 将在现实世界中运行,因此有可能看到来自其他系统的大光脉冲,并导致纳秒激光脉冲产生数十微秒的饱和恢复。
输入直流耦合注意事项
直流耦合输入很简单。在高电平时,图 7 中所示的直流耦合输入允许 TIA 从饱和状态快速恢复,并且仅受 TIA 的饱和恢复限制。这种方法的缺点是它会允许 DC 从 APD 传递到 TIA 输入。遗憾的是,检测器引起的环境光、暗电流和泄漏可能会占用 TIA 的部分或大部分输入线性范围。这种降低的动态范围实质上降低了接收链 SNR。在足够的环境光下,TIA 的动态范围会严重降低至零动态范围,从而使系统失明。
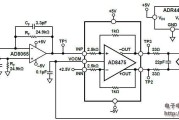
最常用的减少环境光的方法通常涉及光学过滤,如图 8 所示或使用有源电路消除图 9 所示的偏移。光学带通滤波器可以直接涂在 APD 窗口或镜头。在较高水平上,光学带通滤波器将减少环境光的影响。滤光器无助于消除内部光学器件的反射,这会导致较大的不需要的信号。但是,这是一个很好的第一道防线。有源直流消除电路向 TIA 的输入注入相反的电流以抵消输入直流分量。该方案需要从 TIA 输出到其输入的闭环,并且需要非常小心地保持 TIA 的噪声和开关性能??。由于我们正在研究 10k 到 100k 的 TIA 增益,环路稳定性也具有挑战性。本文将不涉及此的电路技术和架构。这里最重要的一点是,一旦电路中的稳定性和输入电容得到缓解,DC 消除就会为饱和恢复提供最佳性能。然而,这是以增加成本和复杂性为代价的。
输入耦合直流电空调电流抵消直流
优点快速饱和恢复
快速通道切换
设计简单
最大动态范围,即使在环境光和 ADP 泄漏的情况下最大动态范围,即使在环境光和 ADP 泄漏的情况下
快速饱和恢复
快速通道切换
缺点环境光和 ADP 泄漏导致的动态范围损失几个设计考虑
缓慢的饱和恢复
需要仔细考虑的复杂电路
互斥的设计选择
在考虑 AC 与 DC 耦合或电流抵消 LIDAR 的 TIA 输入时,有许多权衡取舍。多路复用 LIDAR 接收模拟前端的理想特性是它具有高动态范围、快速恢复、抑制环境光、耗散功率小且带宽不受限制。事实上,其中一些品质具有相互排斥的设计考虑因素。
交流耦合与直流耦合
如果您选择交流耦合,您的动态范围会以饱和时的恢复时间为代价而增加。AC 耦合对于可以容忍 10 微秒的 TIA 恢复时间的应用是有意义的。如果选择 DC 耦合,恢复速度会更快,但代价是您的部分或全部动态范围会因 DC 效应而丢失。直流耦合在需要快速恢复并且对可能抑制动态范围的直流效应不那么敏感的应用中很有意义。如果选择带有集成电流消除的 DC 耦合拓扑,您的动态范围会增加,饱和恢复速度和通道切换会更快,同时需要额外的设计复杂性。
在脉冲应用中,简单地将交流耦合电容器添加到跨阻放大器的输入端可能会损害系统的性能。但是,可以根据您的需要进行权衡以实现现实的目标。并非所有系统都需要最佳恢复时间(例如,工业和仪表系统),并且可以将交流耦合应用于这些电路。在输入为交流耦合时 TIA 难以恢复的情况下,责怪 TIA 很方便。然而,即使使用零恢复时间的理想 TIA 模型,添加交流电容器后恢复时间仍会受到影响。在这种情况下,考虑添加直流耦合或直流耦合与直流消除电路可能是有意义的。
概括
LIDAR 输入不是一个微不足道的话题,在设计过程中会有很多变化的部分。信号链将根据您选择的设计而有所不同,因此在选择最适合您的项目的选项之前考虑所有选项非常重要。
相关文章
发表评论