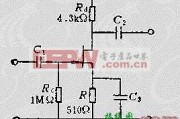
场效应晶体管放大器是电压控制器件,具有输入阻抗高、噪声低的优点,被广泛应用在电子电路中,特别是具有上述要求前级放大器显示器出越性。根据场效应管两大类型...
PIC16F886喇叭驱动器
接线图
2024年03月08日 11:09 354
admin
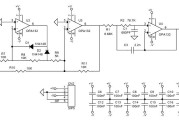
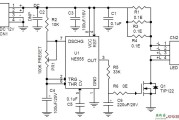
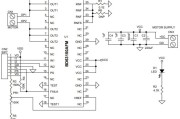
该电路图中展示了 Microchip 技术推出的一个非常有趣的喇叭驱动器项目。该喇叭驱动器项目基于 Microchip 的 PIC16F886 微控制器。该微控制器喇叭驱动器电路图非常简单,需要很少的外部元件。PIC MCU 在器件内具有外设资源,可以以非常简单的方式提供喇叭驱动器服务。
PIC MCU 外设包括脉冲宽度调制 (PWM) 半桥模式下的增强型 CCP (ECCP) 模块,用于驱动 2 个喇叭驱动引线和一个 ADC 输入,用于在调节后监控喇叭反馈。
需要喇叭特性来确定 PWM 模块范围的定义参数。
例如,谐振频率为3.5kHz±0.5kHz的喇叭;PWM 模块生成 3 kHz 至 4 kHz 的 PWM 频率输出,占空比为 50%。
对于以 8 MHz 运行内部振荡器的器件,驱动 PWM 周期的 Timer2 时钟源每秒生成 2M 个时钟。对于 3 kHz 周期,每周期 667 个时钟,对于 4 kHz 周期,每周期 500 个时钟。由于 Timer2 是一个 8 位定时器,仅接受最大值 255,因此每个周期的这些时钟必须进行分频(除以 4 的预分频器,对于 3 kHz,每个周期产生 166 个时钟,对于 4 kHz,每个周期产生 125 个时钟)。千赫)。 ECCP 模块在半桥模式下驱动 PWM 输出,且 P1A 和 P1B 输出均为高电平有效,将以周期速率步进通过每周期 125 到 166 个时钟周期,并且当加载周期寄存器时,值将除以 2 并加载到占空比寄存器中,占空比为 50%。这将成为新的 PWM 周期,用于测量驱动器的反馈,并驱动晶体管,将喇叭引线看到的电平提高到 9V。
PIC MCU 外设包括脉冲宽度调制 (PWM) 半桥模式下的增强型 CCP (ECCP) 模块,用于驱动 2 个喇叭驱动引线和一个 ADC 输入,用于在调节后监控喇叭反馈。
需要喇叭特性来确定 PWM 模块范围的定义参数。
例如,谐振频率为3.5kHz±0.5kHz的喇叭;PWM 模块生成 3 kHz 至 4 kHz 的 PWM 频率输出,占空比为 50%。
对于以 8 MHz 运行内部振荡器的器件,驱动 PWM 周期的 Timer2 时钟源每秒生成 2M 个时钟。对于 3 kHz 周期,每周期 667 个时钟,对于 4 kHz 周期,每周期 500 个时钟。由于 Timer2 是一个 8 位定时器,仅接受最大值 255,因此每个周期的这些时钟必须进行分频(除以 4 的预分频器,对于 3 kHz,每个周期产生 166 个时钟,对于 4 kHz,每个周期产生 125 个时钟)。千赫)。 ECCP 模块在半桥模式下驱动 PWM 输出,且 P1A 和 P1B 输出均为高电平有效,将以周期速率步进通过每周期 125 到 166 个时钟周期,并且当加载周期寄存器时,值将除以 2 并加载到占空比寄存器中,占空比为 50%。这将成为新的 PWM 周期,用于测量驱动器的反馈,并驱动晶体管,将喇叭引线看到的电平提高到 9V。

相关文章
发表评论