对于电力作业人员而言,看懂电路图是基本的技能,熟练的掌握常见的基础电路图也是电工入门的基础,可以很肯定的说:电路图是电工的基础课程,如果简单的电路都看...
电动机制动电路有哪几种?电动机制动电路图和原理
接线图
2023年02月15日 18:14 390
admin
电动机断电后,由于惯性作用,不会马上停止转动。这种情况对于某些生产机械是不适宜的。往往需要在电动机断电后采取某些制动措施。制动的方法一般有两类,一是机械制动,二是电气制动。
1、机械制动
利用外部的机械作用力使电动机转子迅速停止转动的方法称作机械制动。应用较多的机械制动装置是电磁抱闸,它采用制动闸紧紧抱住与电动机同轴的制动轮来产生机械制动力。由于结构上的区别,这种制动又有通电制动和断电制动两种方法。即一种方法是电磁抱闸的线圈通电时产生制动作用,另一种方法是电磁抱闸的线圈断电时产生制动作用。电磁抱闸的线圈虽然要受电源控制才能启动制动或解除制动,但制动力的产生和解除依赖于电磁抱闸装置的弹簧等机械结构,因此称作机械制动。

上图为通电制动的电磁抱闸控制电路。电动机通电运行时,电磁抱闸线圈YB断电,起制动作用的闸瓦和闸轮分离,不影响电动机的正常运行。当电动机断电停止运行时,电磁抱闸的线圈YB得电,闸瓦紧紧抱住闸轮使电动机迅速停车,实现了制动。电动机被制动停车后,电磁抱闸的线圈处于断电状态。这时操作人员可用手动方法扳动传动轴调整工件或进行对刀操作。具体操作与动作的顺序如下,首先合上电源开关QS,之后如果准备起动电动机,则按下起动按钮SB2,交流接触器KM1线圈通电,接触器KM1的常开辅助触点闭合自锁,同时,其主触点闭合,电动机M得电起动运转。
电动机停机制动时,按下复合按钮SB1,其常闭触点首先断开,接触器KM1的线圈断电,常开辅助触点断开,KM1的自锁解除,主触点断开,电动机M断电停机;之后SB1的常开触点迅即闭合,接触器KM2线圈得电,主触点闭合,电磁抱闸线圈YB通电,电磁抱闸的闸瓦紧紧抱住闸轮使电动机迅速停车,实现制动。电动机制动停转后,松开复合按钮SB1,接触器KM2线圈断电,电磁抱闸线圈YB断电,抱闸松开。

上图为断电制动的电磁抱闸控制电路。它是在电源切断时才起制动作用,机械设备在停止状态时,电磁抱闸的闸瓦紧紧抱住闸轮使电动机可靠停车。广泛应用于起重机、卷扬机、电梯等升降机械设备上。当设备运行到一定高度时,如果突然停电或供电线路出现故障导致电动机断电时,电磁抱闸线圈YB也断电,起制动作用的闸瓦和闸轮迅速抱紧起到制动作用,这样可以保证被起重的重物停留在断电位置,电梯被迅速制动则能保证乘客的安全,防止发生意外。这种制动方式的具体操作与动作的顺序如下,首先合上电源开关QS,之后如果准备起动电动机,则按下起动按钮SB2,交流接触器KM线圈通电,接触器KM的常开辅助触点闭合自锁;使接触器保持在吸合状态;其主触点闭合,电磁抱闸的线圈YB得电,松开电磁抱闸的闸瓦和闸轮,与此同时,电动机M得电起动运转。
电动机停机制动时,按下停止按钮SB1,接触器KM的线圈断电,常开辅助触点断开,KM的自锁解除,主触点断开,电动机M断电停机;电磁抱闸的线圈YB同时断电,电磁抱闸的闸瓦紧紧抱住闸轮使电动机迅速停车,实现制动。
2、电气制动
电气制动是电动机停机时使电动机产生一个与电动机旋转方向相反的电磁转矩,起到制动作用。这时电动机将轴上吸收的机械能转换成电能,该电能消耗于转子电阻上或反馈回电网。电气制动有能耗制动、反接制动、再生回馈制动和电容制动等。电气制动可以使电力拖动系统尽快停车或减速,对于位能性负载还能获得稳定的下降速度。
①反接制动
三相异步电动机的反接制动可分为电源反接制动和倒拉反接制动两种。
◆电源反接制动
使用改变电动机定子绕组电源相序的方法来获得制动力矩叫做反接制动。当电动机需要停转制动时,先使电动机脱离电源,然后迅速给电动机接上一个与电动状态相序相反的电源,使电动机产生一个与原转动方向相反的电磁转矩,电动机转速迅速下降并最终停转。但在电动机转速接近零值时,应立即切断反接制动电源,否则,电动机将反向起动。为了能在电动机转速接近零值时及时切断电动机的反接制动电源,防止反转起动,通常在制动电路中接入一个速度继电器KS,速度继电器的转子与电动机的轴相连,电动机运转时,速度继电器KS的转子跟随旋转,当转速等于或超过120r/min时,KS的常开触点闭合;电动机在制动过程中转速接近零值时,例如转速从几千转降至低于100r/min时,KS的常开触点断开。

单向运转电动机的电源反接制动控制电路见上图,图中KM1是运转接触器,KM2是反接制动接触器,KS是速度继电器,R是反接制动限流电阻,可以防止制动过程中电流过大。
电动机停机制动时,按下停止按钮SB1,接触器KM1的线圈断电,常开辅助触点断开,KM1的自锁解除,主触点断开,电动机M断电停机;KM1的常闭辅助触点闭合,成为反接制动接触器KM2线圈通电的另一个条件;按下停止按钮SB1使该按钮的常开触点闭合,由上图可见,反接制动接触器KM2线圈的电源已经接通,KM2的主触点闭合,经限流电阻R将电动机接入一个与电动状态相序相反的电源,电动机开始反接制动,转速迅速降低,当电动机转速降低至100转左右时,速度继电器KS的常开触点断开,接触器KM2线圈断电释放,制动过程结束。

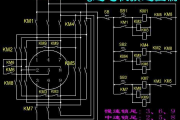
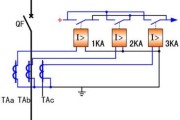
双向运转电动机的电源反接制动控制电路见上图,该电路使用的电器元件见下表。
符号 名称 电路功能
KM1 交流接触器 1.正转运行接触器;2.反转运行时的反接制动接触器
KM2 交流接触器 1.反转运行接触器;2.正转运行时的反接制动接触器
KM3 交流接触器 电动机起动时转速达到120r/min,KM3动作短接限流电阻R
KA1 中间继电器 电动机正转运行停机时,触点KA1-1接通KM2线圈电源,使反接制动开始
KA2 中间继电器 电动机反转运行停机时,触点KA2-1接通KM1线圈电源,使反接制动开始
KA3 中间继电器 电动机停机时,经KA1或KA2触点接通KM2或KM1线圈电源,启动反接制动
KS 速度继电器 检测电动机正转或反转的转速,低于100r/min时控制结束制动过程
SB1 复合按钮 停机及制动按钮
SB2 按钮 正转起动按钮
SB3 按钮 反转起动按钮
R 限流电阻 起动及反接制动时的限流电阻
FU1 熔断器 电动机短路保护
FR 热继电器 电动机过载保护
双向运转电动机的电源反接制动控制电路,正向运转时的起动过程分析见下图。
双向运转电动机的电源反接制动控制电路,正向运转时的制动过程分析见下图。
电动机反向运转的起动、以及停机时的反接制动过程与上述分析相似,区别有三:一是正向运转起动使用按钮SB2,反向运转起动使用按钮SB3;二是正向运转起动时给电动机接通正相序电源的是接触器KM1,而反向运转起动时给电动机接通反相序电源的是接触器KM2;三是正向运转的停机制动由速度继电器的KS-1触点和中间继电器KA1参与控制,而反向运转的停机制动由速度继电器的KS-2触点和中间继电器KA2参与控制。
◆倒拉反接制动
三相绕线转子型异步电动机拖动位能性负载倒拉反接制动的原理可参见上图a ,这里我们引用三相异步电动机的机械特性曲线进行讨论。电动机转速与电磁转矩关系的曲线称为机械特性曲线,它是研究电动机起动、控制、制动、调速的重要工具,用机械特性曲线来分析电动机的工作情况有时更为方便。电动机工作在额定电压和额定频率下,定子绕组按规定方式连接,定子和转子电路不外接电阻等其它电路元件,由电动机本身固有的参数所决定的机械特性称为固有机械特性。电动机正常运行时其工作点就在这条固有机械特性曲线上,如上图b曲线1的a点。人为地改变异步电动机定子电压、电源频率、定子极对数、定子回路电阻或电抗、转子回路电阻或电抗等参数中的一个或多个参数所获得的机械特性,称为人为机械特性,例如上图b中曲线2就是在电动机转子回路中串入电阻R2b(见上图a)以后获得的人为机械特性。
电动机正常提升重物时运行在上图b的固有机械特性曲线1的a点,如果在电动机转子回路中串入电阻R2b,则得到一条新的人为机械特性2。在串入电阻瞬间,电动机转速因机械惯性来不及变化,所以电动机的工作点从固有机械特性曲线1的a点平移至人为机械特性2的b点(因为a点和b点对应的转速相同),由于b点对应的电磁转矩Tb小于a点对应的负载转矩TL,拖动系统开始减速,当转速降低为0工作点已经到达曲线2的c点时,电动机的电磁转矩Tc仍然小于负载转矩TL,在位能负载的重力作用下拖动电动机反向旋转,此时电动机的转速n<0,而电磁转矩T>0,所以电磁转矩T成为制动转矩,电动机进入反接制动状态。在位能负载重力作用下,电动机反转加速,由人为机械特性2可见,其电磁转矩逐渐增大,当达到曲线2的d点时,Td=TL,即电磁转矩等于负载转矩,此时电动机转速稳定在nd上,以稳定的转速下放重物,处于稳定制动运行状态。
只要适当选择电动机转子回路的串联电阻R2b,倒拉反接制动能获得任意低的转速来下放重物,所以安全性较好。
◆能耗制动
将运行中的电动机从交流电源上切除并立即在定子绕组任意两相中通入直流电源,迫使电动机迅速停转的方法称为能耗制动。流过电动机定子绕组的直流电流在电动机中产生一个静止的恒定磁场,而转子因惯性仍然按原方向旋转,转子导体切割恒定磁场产生的感应电动势和感应电流与恒定磁场相互作用产生电磁力与电磁转矩,该电磁转矩的方向与转子旋转方向相反,因此起到制动作用。这种制动是将转子动能转换为电能消耗在转子回路电阻上,动能消耗殆尽最终使转子停转,所以称作能耗制动。能耗制动常采用两种方法,一是无变压器的半波整流能耗制动电路,二是有变压器的桥式整流能耗制动电路。
◆无变压器的半波整流能耗制动电路

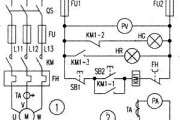
这种能耗制动电路的控制电路见上图,采用一只晶体二极管进行半波整流作为直流电源,因此线路简单,成本低,常用于10kW以下小容量电动机。这种制动电路的工作过程分析如下。
电动机起动运行时,按下起动按钮SB2,这时交流接触器KM1线圈得电动作,其辅助常开触点KM1-1闭合自锁;辅助常闭触点KM1-2切断接触器KM2的线圈通路实现互锁;主触点闭合,电动机起动开始运转。
电动机停机能耗制动时的工作过程分析见上图。
电动机能耗制动时的直流电流通路是:电源相线L1→开关QS→熔断器FU1→接触器KM2主触点→热继电器FR→电动机W与V接线端子内部的绕组→热继电器FR→接触器KM2主触点→晶体二极管D→电阻R→电源中线N,形成一个完整回路,其中电阻R用于调整能耗制动电流大小即制动强度。
上图中时间继电器KT瞬间动作的常开触点KT-2的作用分析如下:如果不使用该触点,而时间继电器线圈开路使时间继电器失效时,能耗制动电源将不能切断,可能引发设备事故。设计的思路是,时间继电器正常时由KT-1延时断开接触器KM2的线圈电源,结束能耗制动;时间继电器线圈开路损坏时,由于不能用使用KT-1延时断开接触器KM2的线圈电源,则由瞬动触点KT-2断开接触器KM2的线圈自锁通路,使制动电源不致于长时间通电。如果操作人员事先知晓时间继电器故障,可以通过持续按压停机制动按钮SB1的方法直至制动结束松开按钮。如果操作人员事先不知晓时间继电器故障,与正常操作一样,只点按一下停机制动按钮SB1,这时电动机将停机而无有制动效果。由于这种制动方式常用于对制动要求不高的10kW以下小容量电动机,一般不会产生较大异常。
◆有变压器的桥式整流能耗制动电路

这种制动方式的控制电路见上图。常用于10kW以上较大容量的电动机。图中T是整流变压器,DZ是单相桥式整流器,电阻R用来调节制动电流,亦即调节制动强度。上图与无变压器的半波整流能耗制动电路的二次控制电路相同,原理分析也相同,这里不再赘述。两个电路的区别是能耗制动使用的直流电源不同,一个是半波整流电源,一个是桥式整流电源,由于制动电源容量大小不同,因此适用于不同容量的电动机。
能耗制动的优点是制动平稳、准确,而且能量消耗较小,一般用于要求制动准确、平稳的场合,如机械加工机床等设备中。
来源:机械工业社
1、机械制动
利用外部的机械作用力使电动机转子迅速停止转动的方法称作机械制动。应用较多的机械制动装置是电磁抱闸,它采用制动闸紧紧抱住与电动机同轴的制动轮来产生机械制动力。由于结构上的区别,这种制动又有通电制动和断电制动两种方法。即一种方法是电磁抱闸的线圈通电时产生制动作用,另一种方法是电磁抱闸的线圈断电时产生制动作用。电磁抱闸的线圈虽然要受电源控制才能启动制动或解除制动,但制动力的产生和解除依赖于电磁抱闸装置的弹簧等机械结构,因此称作机械制动。
上图为通电制动的电磁抱闸控制电路。电动机通电运行时,电磁抱闸线圈YB断电,起制动作用的闸瓦和闸轮分离,不影响电动机的正常运行。当电动机断电停止运行时,电磁抱闸的线圈YB得电,闸瓦紧紧抱住闸轮使电动机迅速停车,实现了制动。电动机被制动停车后,电磁抱闸的线圈处于断电状态。这时操作人员可用手动方法扳动传动轴调整工件或进行对刀操作。具体操作与动作的顺序如下,首先合上电源开关QS,之后如果准备起动电动机,则按下起动按钮SB2,交流接触器KM1线圈通电,接触器KM1的常开辅助触点闭合自锁,同时,其主触点闭合,电动机M得电起动运转。
电动机停机制动时,按下复合按钮SB1,其常闭触点首先断开,接触器KM1的线圈断电,常开辅助触点断开,KM1的自锁解除,主触点断开,电动机M断电停机;之后SB1的常开触点迅即闭合,接触器KM2线圈得电,主触点闭合,电磁抱闸线圈YB通电,电磁抱闸的闸瓦紧紧抱住闸轮使电动机迅速停车,实现制动。电动机制动停转后,松开复合按钮SB1,接触器KM2线圈断电,电磁抱闸线圈YB断电,抱闸松开。
上图为断电制动的电磁抱闸控制电路。它是在电源切断时才起制动作用,机械设备在停止状态时,电磁抱闸的闸瓦紧紧抱住闸轮使电动机可靠停车。广泛应用于起重机、卷扬机、电梯等升降机械设备上。当设备运行到一定高度时,如果突然停电或供电线路出现故障导致电动机断电时,电磁抱闸线圈YB也断电,起制动作用的闸瓦和闸轮迅速抱紧起到制动作用,这样可以保证被起重的重物停留在断电位置,电梯被迅速制动则能保证乘客的安全,防止发生意外。这种制动方式的具体操作与动作的顺序如下,首先合上电源开关QS,之后如果准备起动电动机,则按下起动按钮SB2,交流接触器KM线圈通电,接触器KM的常开辅助触点闭合自锁;使接触器保持在吸合状态;其主触点闭合,电磁抱闸的线圈YB得电,松开电磁抱闸的闸瓦和闸轮,与此同时,电动机M得电起动运转。
电动机停机制动时,按下停止按钮SB1,接触器KM的线圈断电,常开辅助触点断开,KM的自锁解除,主触点断开,电动机M断电停机;电磁抱闸的线圈YB同时断电,电磁抱闸的闸瓦紧紧抱住闸轮使电动机迅速停车,实现制动。
2、电气制动
电气制动是电动机停机时使电动机产生一个与电动机旋转方向相反的电磁转矩,起到制动作用。这时电动机将轴上吸收的机械能转换成电能,该电能消耗于转子电阻上或反馈回电网。电气制动有能耗制动、反接制动、再生回馈制动和电容制动等。电气制动可以使电力拖动系统尽快停车或减速,对于位能性负载还能获得稳定的下降速度。
①反接制动
三相异步电动机的反接制动可分为电源反接制动和倒拉反接制动两种。
◆电源反接制动
使用改变电动机定子绕组电源相序的方法来获得制动力矩叫做反接制动。当电动机需要停转制动时,先使电动机脱离电源,然后迅速给电动机接上一个与电动状态相序相反的电源,使电动机产生一个与原转动方向相反的电磁转矩,电动机转速迅速下降并最终停转。但在电动机转速接近零值时,应立即切断反接制动电源,否则,电动机将反向起动。为了能在电动机转速接近零值时及时切断电动机的反接制动电源,防止反转起动,通常在制动电路中接入一个速度继电器KS,速度继电器的转子与电动机的轴相连,电动机运转时,速度继电器KS的转子跟随旋转,当转速等于或超过120r/min时,KS的常开触点闭合;电动机在制动过程中转速接近零值时,例如转速从几千转降至低于100r/min时,KS的常开触点断开。
单向运转电动机的电源反接制动控制电路见上图,图中KM1是运转接触器,KM2是反接制动接触器,KS是速度继电器,R是反接制动限流电阻,可以防止制动过程中电流过大。
电动机停机制动时,按下停止按钮SB1,接触器KM1的线圈断电,常开辅助触点断开,KM1的自锁解除,主触点断开,电动机M断电停机;KM1的常闭辅助触点闭合,成为反接制动接触器KM2线圈通电的另一个条件;按下停止按钮SB1使该按钮的常开触点闭合,由上图可见,反接制动接触器KM2线圈的电源已经接通,KM2的主触点闭合,经限流电阻R将电动机接入一个与电动状态相序相反的电源,电动机开始反接制动,转速迅速降低,当电动机转速降低至100转左右时,速度继电器KS的常开触点断开,接触器KM2线圈断电释放,制动过程结束。
双向运转电动机的电源反接制动控制电路见上图,该电路使用的电器元件见下表。
符号 名称 电路功能
KM1 交流接触器 1.正转运行接触器;2.反转运行时的反接制动接触器
KM2 交流接触器 1.反转运行接触器;2.正转运行时的反接制动接触器
KM3 交流接触器 电动机起动时转速达到120r/min,KM3动作短接限流电阻R
KA1 中间继电器 电动机正转运行停机时,触点KA1-1接通KM2线圈电源,使反接制动开始
KA2 中间继电器 电动机反转运行停机时,触点KA2-1接通KM1线圈电源,使反接制动开始
KA3 中间继电器 电动机停机时,经KA1或KA2触点接通KM2或KM1线圈电源,启动反接制动
KS 速度继电器 检测电动机正转或反转的转速,低于100r/min时控制结束制动过程
SB1 复合按钮 停机及制动按钮
SB2 按钮 正转起动按钮
SB3 按钮 反转起动按钮
R 限流电阻 起动及反接制动时的限流电阻
FU1 熔断器 电动机短路保护
FR 热继电器 电动机过载保护
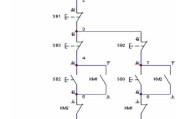
双向运转电动机的电源反接制动控制电路,正向运转时的起动过程分析见下图。
双向运转电动机的电源反接制动控制电路,正向运转时的制动过程分析见下图。
电动机反向运转的起动、以及停机时的反接制动过程与上述分析相似,区别有三:一是正向运转起动使用按钮SB2,反向运转起动使用按钮SB3;二是正向运转起动时给电动机接通正相序电源的是接触器KM1,而反向运转起动时给电动机接通反相序电源的是接触器KM2;三是正向运转的停机制动由速度继电器的KS-1触点和中间继电器KA1参与控制,而反向运转的停机制动由速度继电器的KS-2触点和中间继电器KA2参与控制。
◆倒拉反接制动
三相绕线转子型异步电动机拖动位能性负载倒拉反接制动的原理可参见上图a ,这里我们引用三相异步电动机的机械特性曲线进行讨论。电动机转速与电磁转矩关系的曲线称为机械特性曲线,它是研究电动机起动、控制、制动、调速的重要工具,用机械特性曲线来分析电动机的工作情况有时更为方便。电动机工作在额定电压和额定频率下,定子绕组按规定方式连接,定子和转子电路不外接电阻等其它电路元件,由电动机本身固有的参数所决定的机械特性称为固有机械特性。电动机正常运行时其工作点就在这条固有机械特性曲线上,如上图b曲线1的a点。人为地改变异步电动机定子电压、电源频率、定子极对数、定子回路电阻或电抗、转子回路电阻或电抗等参数中的一个或多个参数所获得的机械特性,称为人为机械特性,例如上图b中曲线2就是在电动机转子回路中串入电阻R2b(见上图a)以后获得的人为机械特性。
电动机正常提升重物时运行在上图b的固有机械特性曲线1的a点,如果在电动机转子回路中串入电阻R2b,则得到一条新的人为机械特性2。在串入电阻瞬间,电动机转速因机械惯性来不及变化,所以电动机的工作点从固有机械特性曲线1的a点平移至人为机械特性2的b点(因为a点和b点对应的转速相同),由于b点对应的电磁转矩Tb小于a点对应的负载转矩TL,拖动系统开始减速,当转速降低为0工作点已经到达曲线2的c点时,电动机的电磁转矩Tc仍然小于负载转矩TL,在位能负载的重力作用下拖动电动机反向旋转,此时电动机的转速n<0,而电磁转矩T>0,所以电磁转矩T成为制动转矩,电动机进入反接制动状态。在位能负载重力作用下,电动机反转加速,由人为机械特性2可见,其电磁转矩逐渐增大,当达到曲线2的d点时,Td=TL,即电磁转矩等于负载转矩,此时电动机转速稳定在nd上,以稳定的转速下放重物,处于稳定制动运行状态。
只要适当选择电动机转子回路的串联电阻R2b,倒拉反接制动能获得任意低的转速来下放重物,所以安全性较好。
◆能耗制动
将运行中的电动机从交流电源上切除并立即在定子绕组任意两相中通入直流电源,迫使电动机迅速停转的方法称为能耗制动。流过电动机定子绕组的直流电流在电动机中产生一个静止的恒定磁场,而转子因惯性仍然按原方向旋转,转子导体切割恒定磁场产生的感应电动势和感应电流与恒定磁场相互作用产生电磁力与电磁转矩,该电磁转矩的方向与转子旋转方向相反,因此起到制动作用。这种制动是将转子动能转换为电能消耗在转子回路电阻上,动能消耗殆尽最终使转子停转,所以称作能耗制动。能耗制动常采用两种方法,一是无变压器的半波整流能耗制动电路,二是有变压器的桥式整流能耗制动电路。
◆无变压器的半波整流能耗制动电路
这种能耗制动电路的控制电路见上图,采用一只晶体二极管进行半波整流作为直流电源,因此线路简单,成本低,常用于10kW以下小容量电动机。这种制动电路的工作过程分析如下。
电动机起动运行时,按下起动按钮SB2,这时交流接触器KM1线圈得电动作,其辅助常开触点KM1-1闭合自锁;辅助常闭触点KM1-2切断接触器KM2的线圈通路实现互锁;主触点闭合,电动机起动开始运转。
电动机停机能耗制动时的工作过程分析见上图。
电动机能耗制动时的直流电流通路是:电源相线L1→开关QS→熔断器FU1→接触器KM2主触点→热继电器FR→电动机W与V接线端子内部的绕组→热继电器FR→接触器KM2主触点→晶体二极管D→电阻R→电源中线N,形成一个完整回路,其中电阻R用于调整能耗制动电流大小即制动强度。
上图中时间继电器KT瞬间动作的常开触点KT-2的作用分析如下:如果不使用该触点,而时间继电器线圈开路使时间继电器失效时,能耗制动电源将不能切断,可能引发设备事故。设计的思路是,时间继电器正常时由KT-1延时断开接触器KM2的线圈电源,结束能耗制动;时间继电器线圈开路损坏时,由于不能用使用KT-1延时断开接触器KM2的线圈电源,则由瞬动触点KT-2断开接触器KM2的线圈自锁通路,使制动电源不致于长时间通电。如果操作人员事先知晓时间继电器故障,可以通过持续按压停机制动按钮SB1的方法直至制动结束松开按钮。如果操作人员事先不知晓时间继电器故障,与正常操作一样,只点按一下停机制动按钮SB1,这时电动机将停机而无有制动效果。由于这种制动方式常用于对制动要求不高的10kW以下小容量电动机,一般不会产生较大异常。
◆有变压器的桥式整流能耗制动电路
这种制动方式的控制电路见上图。常用于10kW以上较大容量的电动机。图中T是整流变压器,DZ是单相桥式整流器,电阻R用来调节制动电流,亦即调节制动强度。上图与无变压器的半波整流能耗制动电路的二次控制电路相同,原理分析也相同,这里不再赘述。两个电路的区别是能耗制动使用的直流电源不同,一个是半波整流电源,一个是桥式整流电源,由于制动电源容量大小不同,因此适用于不同容量的电动机。
能耗制动的优点是制动平稳、准确,而且能量消耗较小,一般用于要求制动准确、平稳的场合,如机械加工机床等设备中。
来源:机械工业社
相关文章
发表评论