这里介绍的项目是一个模拟电容式接近传感器。该电路来自德州仪器 (TI 应用笔记。大多数传统电容式接近传感器产生“1”或“0”输出,该电路产生直流输出,...
智能车安全驾驶中的信号调理电路设计
接线图
2023年05月15日 20:29 279
admin
信号调理电路设计
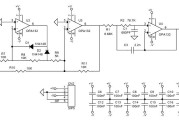
信号调理电路的任务和工作条件是:1)带宽和增益,对20 kHz、毫伏级的信号放大约1 000倍,且动态范围较大;2)供电电源,车载电池供电,使用单电源放大电路,电池额定电压为7.2 V;3)信号转换,对放大后的信号进行幅度检波。使用分立元件搭建电路虽然能实现该功能,但电路复杂,调试不方便,并且电路性能会随电池电压的波动而变化。常见的通用运放如OP07、LM324、 LM358等,对于20 kHz信号无法满足带宽和增益的要求,同时,其输出摆幅较小。近年来出现的一些新的集成运算放大器能很好地承担上述任务。如OPA228系列运放、 MAX445l系列运放。特别是MAX4451双运放,-3 dB带宽达210 MHz,可以在+4.5~+11 V单电源条件下工作,输出摆幅大,具有轨到轨输出,开环增益大于50 dB,使用两级放大外加负反馈完全能胜任。实际电路如图1所示。

智能车是靠电池驱动的,随着工作时间持续,电池电压必然下降。由于运放MAX4451的共模抑制比极高,典型值CMRR=95 dB,所以在单电源条件下可正常工作,并且,电池电压的波动基本不影响运放的工作性能。
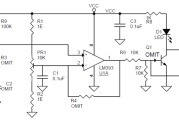
图 1中L1是检测线圈。R1、R2分压为运放提供输入偏置电压,适当调节R2可改变放大器的输入偏置电压。由于第2级放大电路的增益设定为 (R5/R4)=30倍,可根据检测线圈L1输出感应电动势的大小,适当选择R3改变第1级的放大倍数,从而使总增益满足要求。引入R7是为了降低第1级放大电路的直流增益,从而提高静态工作点的稳定性。但R7的引入降低了第1级电路的交流放大能力,故接人C4=0.47μF实现交流旁路。VD1、R6和 C3构成幅度检波电路,VD4选择压降较小的高频锗二极管,检波电路的时间常数τ=R6C3一般选择为激磁电流(f=20 kHz)周期的3~5倍,C3的容量越大,输出到单片机A/D端的直流电压中的20 kHz波纹越小,但C3的容量过大将导致电路响应时间长,对智能车与赛道的偏离反应迟钝.C3的实际取值应在此估算的基础上通过测试确定。
此外,按常理,R1=R2分压为运放提供输入偏置应该为电源电压VCC的一半,约3.6 V。但由于VD1、R6和C3构成的是正半周峰值包络检波电路,检测线圈L1的感应电动势越大,检波电路输出的直流电位越高。如前所述,线圈输出的感应电动势受多种因素影响变化范围较大,为增大此电路的输出摆幅,选择R1=20 kΩ,R2=5.1kΩ,使运放同相端的输入偏置电压降低到约1.8 V,以降低检波电路输出端的初始直流电位,增大电路的动态范围。
相关文章



发表评论