CAN总线通信电路图 ...
基于82C250收发电路设计 - 汽车辅助系统CAN总线接口电路设计
接线图
2023年05月15日 20:29 817
admin
基于82C250收发电路设计
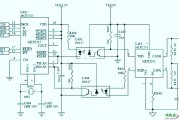
82C250是CAN控制器与物理总线间的接口,可以提供对总线的差动发送和接收能力,与IS011898标准完全兼容,并具有抗汽车环境下的瞬间干扰、保护总线的能力。设计中,收发器的接受、发送脚原理上要和SJA1000的发送、接受脚相连接。但这样一来,两者的电气不一致,造成电气隔离,给通信带来麻烦。为此,在它们之间接上高速光耦合器6N137,避开了电气隔离,更好的实现通信联系。82C250的TXD、RXT就对应接上6N137的输出脚OUT和输入脚 IN;脚Rs作为斜率控制电阻输入端,电阻的大小可以割据总线通信速度适当调整一般在16~140KΩ之间,设计中Rs阻值为47KΩ。在通过接一个 47K电阻分流之后,可以接地。电压引脚Vcc,其电源电压:4.5V〈 Vcc〈 5.5V,在设计中采用5V电压。Vref作为基准电压输出端,设计中可以接地。而CANH,CANL脚是信号的输入输出,实现对电平信号的传送,通过它们连接上双绞线,完成通信传输。

基于X5045P的电路设计
X5045P在本设计中做为复位、监控电路使用,虽然增加了电路连接的复杂和成本,但对于电路的稳定和可靠性有起到很大的作用,是系统中不可缺少的部分。对X5045的操作是通过4根口线CS、SCK、SI和SO进行同步串行通信来完成的。SCK是外部输入的同步时钟信号。在对芯片定改指令或数据时,时钟前沿将SI引脚信号输入;在读邮数据时,时钟后沿将数据位输出到SO引脚上。数据的输入/输出都是高位在先。在设计中,/CS脚和单片机P1.0、 SI、 SCK、SO、RST分别与单片机的引脚P1.0~P1.3、RST连接。对于不用到的引脚,可以直接和地相连。电路设计如下:

图2-10 X5045P电路监控、复位电路
欲了解视频监控相关解决方案与电路图设计,可关注电子发烧友荣誉出品的Designs of week栏目:
相关文章


发表评论